|
MOAB: Mesh Oriented datABase
(version 5.4.1)
|
|
MOAB: Mesh Oriented datABase
(version 5.4.1)
|
#include <QuasiNewton.hpp>
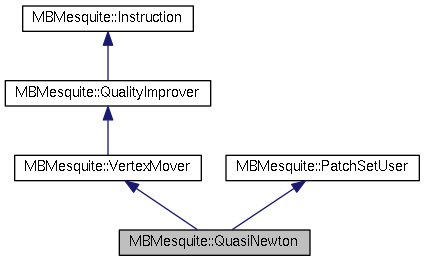
 Inheritance diagram for MBMesquite::QuasiNewton: Collaboration diagram for MBMesquite::QuasiNewton:
Inheritance diagram for MBMesquite::QuasiNewton: Collaboration diagram for MBMesquite::QuasiNewton:Public Member Functions | |
| MESQUITE_EXPORT | QuasiNewton (ObjectiveFunction *of) |
| virtual MESQUITE_EXPORT | ~QuasiNewton () |
| PatchSet * | get_patch_set () |
| MESQUITE_EXPORT std::string | get_name () const |
| Get string name for use in diagnostic and status output. | |
Protected Member Functions | |
| virtual void | initialize (PatchData &pd, MsqError &err) |
| virtual void | optimize_vertex_positions (PatchData &pd, MsqError &err) |
| virtual void | initialize_mesh_iteration (PatchData &pd, MsqError &err) |
| virtual void | terminate_mesh_iteration (PatchData &pd, MsqError &err) |
| virtual void | cleanup () |
| void | solve (Vector3D *z, const Vector3D *v) const |
Private Types | |
| enum | Constants { QNVEC = 5 } |
Private Attributes | |
| PatchDataVerticesMemento * | mMemento |
| std::vector< Vector3D > | x |
| std::vector< Vector3D > | v [QNVEC+1] |
| std::vector< Vector3D > | w [QNVEC+1] |
| std::vector< Vector3D > | d |
| std::vector< SymMatrix3D > | mHess |
Definition at line 45 of file QuasiNewton.hpp.
enum MBMesquite::QuasiNewton::Constants [private] |
Definition at line 59 of file QuasiNewton.cpp.
: VertexMover( of ), PatchSetUser( true ), mMemento( 0 ) {}
| MBMesquite::QuasiNewton::~QuasiNewton | ( | ) | [virtual] |
Definition at line 61 of file QuasiNewton.cpp.
References mMemento.
| void MBMesquite::QuasiNewton::cleanup | ( | ) | [protected, virtual] |
Implements MBMesquite::VertexMover.
Definition at line 79 of file QuasiNewton.cpp.
References d, MBMesquite::free_vector(), mHess, mMemento, v, w, and x.
{
// release memento
delete mMemento;
mMemento = 0;
// release coordinates
for( size_t i = 0; i < ( sizeof( w ) / sizeof( w[0] ) ); ++i )
free_vector( w[i] );
// release gradients
for( size_t i = 0; i < ( sizeof( v ) / sizeof( v[0] ) ); ++i )
free_vector( v[i] );
// release Hessian memory
free_vector( mHess );
// release temporary array memory
free_vector( x );
free_vector( d );
}
| std::string MBMesquite::QuasiNewton::get_name | ( | ) | const [virtual] |
Get string name for use in diagnostic and status output.
Implements MBMesquite::Instruction.
Definition at line 49 of file QuasiNewton.cpp.
{
return "QuasiNewton";
}
| PatchSet * MBMesquite::QuasiNewton::get_patch_set | ( | ) | [virtual] |
Reimplemented from MBMesquite::PatchSetUser.
Definition at line 54 of file QuasiNewton.cpp.
{
return PatchSetUser::get_patch_set();
}
| void MBMesquite::QuasiNewton::initialize | ( | PatchData & | pd, |
| MsqError & | err | ||
| ) | [protected, virtual] |
Implements MBMesquite::VertexMover.
Definition at line 67 of file QuasiNewton.cpp.
References MBMesquite::PatchData::create_vertices_memento(), mMemento, and MSQ_CHKERR.
{
if( !mMemento )
{
mMemento = pd.create_vertices_memento( err );MSQ_CHKERR( err );
}
}
| void MBMesquite::QuasiNewton::initialize_mesh_iteration | ( | PatchData & | pd, |
| MsqError & | err | ||
| ) | [protected, virtual] |
| void MBMesquite::QuasiNewton::optimize_vertex_positions | ( | PatchData & | pd, |
| MsqError & | err | ||
| ) | [protected, virtual] |
Implements MBMesquite::VertexMover.
Definition at line 169 of file QuasiNewton.cpp.
References MBMesquite::TerminationCriterion::accumulate_inner(), MBMesquite::TerminationCriterion::accumulate_patch(), MBMesquite::arrptr(), b, MBMesquite::MsqError::BARRIER_VIOLATED, beta, MBMesquite::MsqError::clear(), d, epsilon, MBMesquite::MsqError::error_code(), MBMesquite::OFEvaluator::evaluate(), MBMesquite::PatchData::get_free_vertex_coordinates(), MBMesquite::QualityImprover::get_inner_termination_criterion(), MBMesquite::VertexMover::get_objective_function_evaluator(), MBMesquite::inner(), INTERNAL_ERROR, MBMesquite::MsqError::INVALID_MESH, MBMesquite::length(), mHess, mMemento, MBMesquite::PatchData::move_free_vertices_constrained(), MSQ_ERRRTN, MSQ_SETERR, MBMesquite::PatchData::num_free_vertices(), MBMesquite::plus_eq_scaled(), QNVEC, MBMesquite::PatchData::recreate_vertices_memento(), MBMesquite::PatchData::set_free_vertices_constrained(), MBMesquite::PatchData::set_to_vertices_memento(), solve(), MBMesquite::TerminationCriterion::terminate(), MBMesquite::OFEvaluator::update(), v, w, and x.
{
TerminationCriterion& term = *get_inner_termination_criterion();
OFEvaluator& func = get_objective_function_evaluator();
const double sigma = 1e-4;
const double beta0 = 0.25;
const double beta1 = 0.80;
const double tol1 = 1e-8;
const double epsilon = 1e-10;
// double norm_r; //, norm_g;
double alpha, beta;
double obj, objn;
size_t i;
// Initialize stuff
const size_t nn = pd.num_free_vertices();
double a[QNVEC], b[QNVEC], r[QNVEC];
for( i = 0; i < QNVEC; ++i )
r[i] = 0;
for( i = 0; i <= QNVEC; ++i )
{
v[i].clear();
v[i].resize( nn, Vector3D( 0.0 ) );
w[i].clear();
w[i].resize( nn, Vector3D( 0.0 ) );
}
d.resize( nn );
mHess.resize( nn ); // hMesh(mesh);
bool valid = func.update( pd, obj, v[QNVEC], mHess, err );MSQ_ERRRTN( err );
if( !valid )
{
MSQ_SETERR( err )( "Initial objective function is not valid", MsqError::INVALID_MESH );
return;
}
while( !term.terminate() )
{
pd.recreate_vertices_memento( mMemento, err );MSQ_ERRRTN( err );
pd.get_free_vertex_coordinates( w[QNVEC] );
x = v[QNVEC];
for( i = QNVEC; i--; )
{
a[i] = r[i] * inner( &( w[i][0] ), arrptr( x ), nn );
plus_eq_scaled( arrptr( x ), -a[i], &v[i][0], nn );
}
solve( arrptr( d ), arrptr( x ) );
for( i = QNVEC; i--; )
{
b[i] = r[i] * inner( &( v[i][0] ), arrptr( d ), nn );
plus_eq_scaled( arrptr( d ), a[i] - b[i], &( w[i][0] ), nn );
}
alpha = -inner( &( v[QNVEC][0] ), arrptr( d ), nn ); /* direction is negated */
if( alpha > 0.0 )
{
MSQ_SETERR( err )( "No descent.", MsqError::INVALID_MESH );
return;
}
alpha *= sigma;
beta = 1.0;
pd.move_free_vertices_constrained( arrptr( d ), nn, -beta, err );MSQ_ERRRTN( err );
valid = func.evaluate( pd, objn, v[QNVEC], err );
if( err.error_code() == err.BARRIER_VIOLATED )
err.clear(); // barrier violated does not represent an actual error here
MSQ_ERRRTN( err );
if( !valid || ( obj - objn < -alpha * beta - epsilon && length( &( v[QNVEC][0] ), nn ) >= tol1 ) )
{
if( !valid ) // function not defined at trial point
beta *= beta0;
else // unacceptable iterate
beta *= beta1;
for( ;; )
{
if( beta < tol1 )
{
pd.set_to_vertices_memento( mMemento, err );MSQ_ERRRTN( err );
MSQ_SETERR( err )( "Newton step not good", MsqError::INTERNAL_ERROR );
return;
}
pd.set_free_vertices_constrained( mMemento, arrptr( d ), nn, -beta, err );MSQ_ERRRTN( err );
valid = func.evaluate( pd, objn, err );
if( err.error_code() == err.BARRIER_VIOLATED )
err.clear(); // barrier violated does not represent an actual error here
MSQ_ERRRTN( err );
if( !valid ) // function undefined at trial point
beta *= beta0;
else if( obj - objn < -alpha * beta - epsilon ) // unacceptlable iterate
beta *= beta1;
else
break;
}
}
for( i = 0; i < QNVEC - 1; ++i )
{
r[i] = r[i + 1];
w[i].swap( w[i + 1] );
v[i].swap( v[i + 1] );
}
w[QNVEC - 1].swap( w[0] );
v[QNVEC - 1].swap( v[0] );
func.update( pd, obj, v[QNVEC], mHess, err );MSQ_ERRRTN( err );
// norm_r = length_squared( &(v[QNVEC][0]), nn );
// norm_g = sqrt(norm_r);
// checks stopping criterion
term.accumulate_patch( pd, err );MSQ_ERRRTN( err );
term.accumulate_inner( pd, objn, &v[QNVEC][0], err );MSQ_ERRRTN( err );
}
}
| void MBMesquite::QuasiNewton::solve | ( | Vector3D * | z, |
| const Vector3D * | v | ||
| ) | const [protected] |
Definition at line 108 of file QuasiNewton.cpp.
Referenced by optimize_vertex_positions().
{
SymMatrix3D pd;
const double small = DBL_EPSILON;
const size_t nn = mHess.size();
for( size_t i = 0; i < nn; ++i )
{
// ensure positive definite: perturb a bit if
// diagonal values are zero.
SymMatrix3D dd = mHess[i];
while( fabs( dd[0] ) < small || fabs( dd[3] ) < small || fabs( dd[5] ) < small )
dd += small;
// factor
pd[0] = 1.0 / dd[0];
pd[1] = dd[1] * pd[0];
pd[2] = dd[2] * pd[0];
pd[3] = 1.0 / ( dd[3] - dd[1] * pd[1] );
pd[5] = dd[4] - dd[2] * pd[1];
pd[4] = pd[3] * pd[5];
pd[5] = 1.0 / ( dd[5] - dd[2] * pd[2] - pd[4] * pd[5] );
if( pd[0] <= 0.0 || pd[3] <= 0.0 || pd[5] <= 0.0 )
{
if( dd[0] + dd[3] + dd[5] <= 0 )
{
// switch to diagonal
pd[0] = 1.0 / fabs( dd[0] );
pd[1] = 0.0;
pd[2] = 0.0;
pd[3] = 1.0 / fabs( dd[3] );
pd[4] = 0.0;
pd[5] = 1.0 / fabs( dd[5] );
}
else
{
// diagonal preconditioner
pd[0] = pd[3] = pd[5] = 1.0 / ( dd[0] + dd[3] + dd[5] );
pd[1] = pd[2] = pd[4] = 0.0;
}
}
// solve
const Vector3D& vv = v_arr[i];
Vector3D& z = z_arr[i];
z[0] = vv[0];
z[1] = vv[1] - pd[1] * z[0];
z[2] = vv[2] - pd[2] * z[0] - pd[4] * z[1];
z[0] *= pd[0];
z[1] *= pd[3];
z[2] *= pd[5];
z[1] -= pd[4] * z[2];
z[0] -= pd[1] * z[1] + pd[2] * z[2];
}
}
| void MBMesquite::QuasiNewton::terminate_mesh_iteration | ( | PatchData & | pd, |
| MsqError & | err | ||
| ) | [protected, virtual] |
std::vector< Vector3D > MBMesquite::QuasiNewton::d [private] |
Definition at line 72 of file QuasiNewton.hpp.
Referenced by cleanup(), and optimize_vertex_positions().
std::vector< SymMatrix3D > MBMesquite::QuasiNewton::mHess [private] |
Definition at line 73 of file QuasiNewton.hpp.
Referenced by cleanup(), optimize_vertex_positions(), and solve().
Definition at line 71 of file QuasiNewton.hpp.
Referenced by cleanup(), initialize(), optimize_vertex_positions(), and ~QuasiNewton().
std::vector< Vector3D > MBMesquite::QuasiNewton::v[QNVEC+1] [private] |
Definition at line 72 of file QuasiNewton.hpp.
Referenced by cleanup(), and optimize_vertex_positions().
std::vector< Vector3D > MBMesquite::QuasiNewton::w[QNVEC+1] [private] |
Definition at line 72 of file QuasiNewton.hpp.
Referenced by cleanup(), and optimize_vertex_positions().
std::vector< Vector3D > MBMesquite::QuasiNewton::x [private] |
Definition at line 72 of file QuasiNewton.hpp.
Referenced by cleanup(), and optimize_vertex_positions().
 1.7.6.1
1.7.6.1