|
MOAB: Mesh Oriented datABase
(version 5.4.1)
|
|
MOAB: Mesh Oriented datABase
(version 5.4.1)
|
1.EntitySequence & SequenceData
2.TypeSequenceManager & SequenceManager
5.Implementation of Error Handling
5.1. Existing Error Handling Model
5.2. Enhanced Error Handling Model
5.5. Embedded Parallel Functionality
5.6. Handle Non-error Conditions
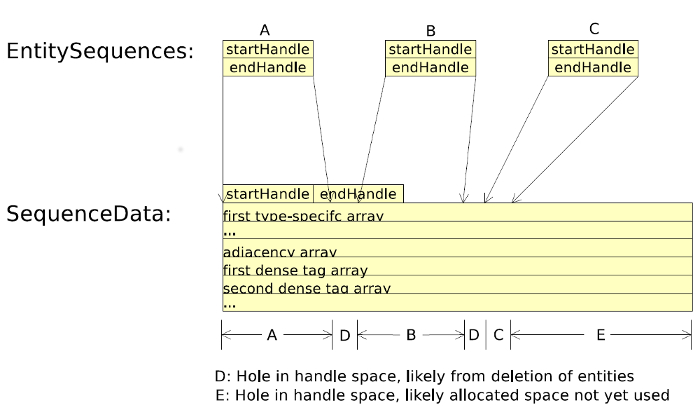
The SequenceData class manages as set of arrays of per-entity values. Each SequenceData has a start and end handle denoting the block of entities for which the arrays contain data. The arrays managed by a SequenceData instance are divided into three groups:
The abstract EntitySequence class is a non-strict subset of a SequenceData. It contains a pointer to a SequenceData and the start and end handles to indicate the subset of the referenced SequenceData. The EntitySequence class is used to represent the regions of valid (or allocated) handles in a SequenceData. A SequenceData is expected to be referenced by one or more EntitySequence instances.
Initial EntitySequence and SequenceData pairs are typically created in one of two configurations. When reading from a file, a SequenceData will be created to represent all of a single type of entity contained in a file. As all entries in the SequenceData correspond to valid handles (entities read from the file) a single EntitySequence instance corresponding to the entire SequenceData is initially created. The second configuration arises when allocating a single entity. If no entities have been allocated yet, a new SequenceData must be created to store the entity data. It is created with a constant size (e.g. 4k entities). The new EntitySequence corresponds to only the first entity in the SequenceData: the one allocated entity. As subsequent entities are allocated, the EntitySequence is extended to cover more of the corresponding SequenceData.
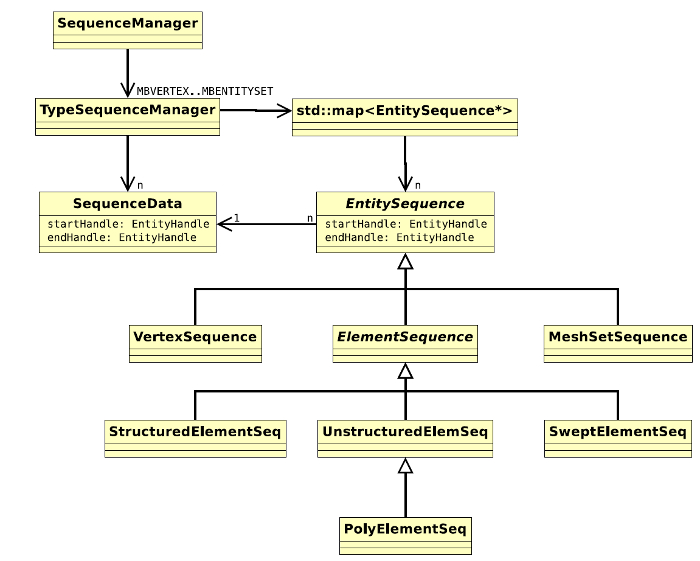
Concrete subclasses of the EntitySequence class are responsible for representing specific types of entities using the array storage provided by the SequenceData class. They also handle allocating SequenceData instances with appropriate arrays for storing a particular type of entity. Each concrete subclass typically provides two constructors corresponding to the two initial allocation configurations described in the previous paragraph. EntitySequence implementations also provide a split method, which is a type of factory method. It modifies the called sequence and creates a new sequence such that the range of entities represented by the original sequence is split.
The VertexSequence class provides an EntitySequence for storing vertex data. It references a SequenceData containing three arrays of doubles for storing the blocked vertex coordinate data. The ElementSequence class extends the EntitySequence interface with element-specific functionality. The UnstructuredElemSeq class is the concrete implementation of ElementSequence used to represent unstructured elements, polygons, and polyhedra. MeshSetSequence is the EntitySequence used for storing entity sets.
Each EntitySequence implementation also provides an implementation of the values per entity method. This value is used to determine if an existing SequenceData that has available entities is suitable for storing a particular entity. For example, UnstructuredElemSeq returns the number of nodes per element from values per entity. When allocating a new element with a specific number of nodes, this value is used to determine if that element may be stored in a specific SequenceData. For vertices, this value is always zero. This could be changed to the number of coordinates per vertex, allowing representation of mixed-dimension data. However, API changes would be required to utilize such a feature. Sequences for which the corresponding data cannot be used to store new entities (e.g. structured mesh discussed in a later section) will return -1 or some other invalid value.
The TypeSequenceManager class maintains an organized set of EntitySequence instances and corresponding SequenceData instances. It is used to manage all such instances for entities of a single EntityType. TypeSequenceManager enforces the following four rules on its contained data:
The first three rules are required for the validity of the data model. The fourth rule avoids unnecessary inefficiency. It is implemented by merging such adjacent sequences. In some cases, other classes (e.g. SequenceManager) can modify an EntitySequence such that the fourth rule is violated. In such cases, the TypeSequenceManager::notify prepended or TypeSequenceManager::notify appended method must be called to maintain the integrity of the data1. The above rules (including the fourth) are assumed in many other methods of the TypeSequenceManager class, such that those methods will fail or behave unexpectedly if the managed data does not conform to the rules.
TypeSequenceManager contains three principal data structures. The first is a std::set of EntitySequence pointers sorted using a custom comparison operator that queries the start and end handles of the referenced sequences. The comparison operation is defined as: a->end_handle() < b->start_handle(). This method of comparison has the advantage that a sequence corresponding to a specific handle can be located by searching the set for a “sequence” beginning and ending with the search value. The lower bound and find methods provided by the library are guaranteed to return the sequence, if it exists. Using such a comparison operator will result in undefined behavior if the set contains overlapping sequences. This is acceptable, as rule two above prohibits such a configuration. However, some care must be taken in writing and modifying methods in TypeSequenceManager so as to avoid having overlapping sequences as a transitory state of some operation.
The second important data member of TypeSequenceManager is a pointer to the last referenced EntitySequence. This “cached” value is used to speed up searches by entity handle. This pointer is never null unless the sequence is empty. This rule is maintained to avoid unnecessary branches in fast query paths. In cases where the last referenced sequence is deleted, TypeSequenceManager will typically assign an arbitrary sequence (e.g. the first one) to the last referenced pointer. (Note: this cached value might give problems for threading models; it should probably be different for each thread)
The third data member of TypeSequenceManager is a std::set of SequenceData instances that are not completely covered by a EntitySequence instance2. This list is searched when allocating new handles. TypeSequenceManager also embeds in each SequenceData instance a reference to the first corresponding EntitySequence so that it may be located quickly from only the SequenceData pointer.
The SequenceManager class contains an array of TypeSequenceManager in- stances, one for each EntityType. It also provides all type-specific operations such as allocating the correct EntitySequence subtype for a given EntityType.
1This source of potential error can be eliminated with changes to the entity set representation. This is discussed in a later section.
2Given rule four for the data managed by a TypeSequenceManager, any SequenceData for which all handles are allocated will be referenced by exactly one EntitySequence.
Structured mesh storage is implemented using subclasses of SequenceData: ScdElementData and ScdVertexData. The StructuredElementSeq class is used to access the structured element connectivity. A standard VertexSequence instance is used to access the ScdVertexData because the vertex data storage is the same as for unstructured mesh.
The MeshSetSequence class is the same as most other subclasses of EntitySequence in that it utilizes SequenceData to store its data. A single array in the SequenceData is used to store instances of the MeshSet class, one per allocated EntityHandle. SequenceData allocates all of its managed arrays using malloc and free as simple arrays of bytes. MeshSetSequence does in-place construction and destruction of MeshSet instances within that array. This is similar to what is done by std::vector and other container classes that may own more storage than is required at a given time for contained objects.

The MeshSet class is used to represent a single entity set instance in MOAB. The class is optimized to minimize storage (further possible improvements in storage size are discussed later.)
Figure 3 shows the memory layout of an instance of the MeshSet class. The flags member holds the set creation bit flags: MESHSET_TRACK_OWNER, MESHSET_SET, and MESHSET_ORDERED. The presence of the MESHSET_TRACK_OWNER indicates that reverse links from the contained entities back to the owning set should be maintained in the adjacency list of each entity. The MESHSET_SET and MESHSET_ORDERED bits are mutually exclusive, and as such most code only tests for the MESHSET_ORDERED, meaning that in practice the MESHSET_SET bit is ignored. MESHSET_ORDERED indicates that the set may contain duplicate handles and that the order that the handles are added to the set should be preserved. In practice, such sets are stored as a simple list of handles. MESHSET_SET (or in practice, the lack of MESHSET_ORDERED) indicates that the order of the handles need not be preserved and that the set may not contain duplicate handles. Such sets are stored in a sorted range-compacted format similar to that of the Range class.
The memory for storing contents, parents, and children are each handled in the same way. The data in the class is composed of a 2-bit ‘size’ field and two values, where the two values may either be two handles or two pointers. The size bit-fields are grouped together to reduce the required amount of memory. If the numerical value of the 2-bit size field is 0 then the corresponding list is empty. If the 2-bit size field is either 1 or 2, then the contents of the corresponding list are stored directly in the corresponding two data fields of the MeshSet object. If the 2-bit size field has a value of 3 (11 binary), then the corresponding two data fields store the begin and end pointers of an external array of handles. The number of handles in the external array can be obtained by taking the difference of the start and end pointers. Note that unlike std::vector, we do not store both an allocated and used size. We store only the ‘used’ size and call std::realloc whenever the used size is modified, thus we rely on the std::malloc implementation in the standard C library to track ‘allocated’ size for us. In practice this performs well but does not return memory to the ‘system’ when lists shrink (unless they shrink to zero). This overall scheme could exhibit poor performance if the size of one of the data lists in the set frequently changes between less than two and more than two handles, as this will result in frequent releasing and re-allocating of the memory for the corresponding array.
If the MESHSET_ORDERED flag is not present, then the set contents list (parent and child lists are unaffected) is stored in a range-compacted format. In this format the number of handles stored in the array is always a multiple of two. Each consecutive pair of handles indicate the start and end, inclusive, of a range of handles contained in the set. All such handle range pairs are stored in sorted order and do not overlap. Nor is the end handle of one range ever one less than the start handle of the next. All such ‘adjacent’ range pairs are merged into a single pair. The code for insertion and removal of handles from range-formatted set content lists is fairly complex. The implementation will guarantee that a given call to insert entities into a range or remove entities from a range is never worse than O(ln n) + O(m + n), where ‘n’ is the number of handles to insert and ‘m’ is the number of handles already contained in the set. So it is generally much more efficient to build Ranges of handles to insert (and remove) and call MOAB to insert (or remove) the entire list at once rather than making many calls to insert (or remove) one or a few handles from the contents of a set. The set storage could probably be further minimized by allowing up to six handles in one of the lists to be elided. That is, as there are six potential ‘slots’ in the MeshSet object then if two of the lists are empty it should be possible to store up to six values of the remaining list directly in the MeshSet object. However, the additional runtime cost of such complexity could easily outweigh any storage advantage. Further investigation into this has not been done because the primary motivation for the storage optimization was to support binary trees.
Another possible optimization of storage would be to remove the MeshSet object entirely and instead store the data in a ‘blocked’ format. The corresponding SequenceData would contain four arrays: flags, parents, children, and contents instead of a single array of MeshSet objects. If this were done then no storage need ever be allocated for parent or child links if none of the sets in a SequenceData has parent or child links. The effectiveness of the storage reduction would depend greatly on how sets get grouped into SequenceDatas. This alternate storage scheme might also allow for better cache utilization as it would group like data together. It is often the case that application code that is querying the contents of one set will query the contents of many but never query the parents or children of any set. Or that an application will query only parent or child links of a set without every querying other set properties. The downside of this solution is that it makes the implementation a little less mod- ular and maintainable because the existing logic contained in the MeshSet class would need to be spread throughout the MeshSetSequence class.
When a certain error occurs, a MOAB routine can return an enum type ErrorCode (defined in src/moab/Types.hpp) to its callers. Since MOAB 4.8, the existing error handling model has been completely redesigned to better set and check errors.
To keep track of detail information about errors, a class Error (defined in src/moab/Error.hpp) is used to store corresponding error messages. Some locally defined macros call Error::set_last_error() to report a new error message, before a non-success error code is returned. At any time, user may call Core::get_last_error() to retrieve the latest error message from the Error class instance held by MOAB.
Limitations:
The error handling model of PETSc (http://www.mcs.anl.gov/petsc/) has nice support for stack trace, and our design has borrowed many ideas from that. The new features of the enhanced model include:
MB_SET_ERR(MB_FAILURE, "Failed to iterate over tag on " << NUM_VTX << " vertices");
result = MOABRoutine(...);MB_CHK_SET_ERR(result, "Error message to set if result is not MB_SUCCESS");
The public include file for error handling is src/moab/ErrorHandler.hpp, the source code for the error handling is in src/ErrorHandler.cpp.
The error handling function MBError() only calls one default error handler, MBTraceBackErrorHandler(), which tries to print out a stack trace. In the future, we need to provide a callback function to user routine before a complete abort. Something like a UserTeardown that is a function pointer with a context so that the user can destroy and free essential handles before an MPI abort.
The arguments to MBTraceBackErrorHandler() are the line number where the error occurred, the function where error was detected, the file in which the error was detected, the source directory, the error message, and the error type indicating whether the error message should be printed.
ErrorCode MBTraceBackErrorHandler(int line, const char* func, const char* file, const char* dir, const char* err_msg, ErrorType err_type);
This handler will print out a line of stack trace, indicating line number, function name, directory and file name. If MB_ERROR_TYPE_EXISTING is passed as the error type, the error message will not be printed.
The simplified C/C++ macro-based interface consists of the following three basic macros:
MB_SET_ERR(Error code, "Error message"); MB_CHK_ERR(Error code); MB_CHK_SET_ERR(Error code, "Error message");
The macro MB_SET_ERR(err_code, err_msg) is given by
std::ostringstream err_ostr; err_ostr << err_msg; return MBError(__LINE__, __func__, __FILENAME__, __SDIR__, err_code, err_ostr.str().c_str(), MB_ERROR_TYPE_NEW_LOCAL);
It calls the error handler with the current function name and location: line number, file and directory, plus an error code, an error message and an error type. With an embedded std::ostringstream object, it supports C++ style streams to build up error messages. The error type is MB_ERROR_TYPE_NEW_LOCAL/MB_ERROR_TYPE_NEW_GLOBAL on detection of the initial error and MB_ERROR_TYPE_EXISTING for any additional calls. This is so that the detailed error information is only printed once instead of for all levels of returned errors.
The macro MB_CHK_ERR(err_code) is defined by
if (MB_SUCCESS != err_code) return MBError(__LINE__, __func__, __FILENAME__, __SDIR__, err_code, "", MB_ERROR_TYPE_EXISTING);
It checks the error code, if not MB_SUCCESS, calls the error handler with error type MB_ERROR_TYPE_EXISTING and return.
The MB_CHK_SET_ERR(err_code, err_msg) is defined by
if (MB_SUCCESS != err_code) MB_SET_ERR(err_code, err_msg);
It checks the error code, if not MB_SUCCESS, calls MB_SET_ERR() to set a new error.
To obtain correct line numbers in the stack trace, we recommend putting MB_CHK_ERR() and MB_CHK_SET_ERR() at the same line as a MOAB routine.
In addition to the basic macros mentioned above, there are some variations, such as (for more information, refer to src/moab/ErrorHandler.hpp):
We define a global MPI rank with which to prefix the output, as most systems have mechanisms for separating output by rank anyway. For the error handler, we can pass error type MB_ERROR_TYPE_NEW_GLOBAL for globally fatal errors and MB_ERROR_TYPE_NEW_LOCAL for per-processor relevant errors.
Note, if the error handler uses std::cout to print error messages and stack traces in each processor, it can result in a messy output. This is a known MPI issue with std::cout, and existing DebugOutput class has solved this issue with buffered lines. A new class ErrorOutput (implemented similar to DebugOutput) is used by the error handler to print each line prefixed with the MPI rank.
We should notice that sometimes ErrorCode is used to return a non-error condition (some internal error code that can be handled, or even expected, e.g. MB_TAG_NOT_FOUND). Therefore, MB_SET_ERR() should be appropriately placed to report an error to the the caller. Before it is used, we need to carefully decide whether that error is intentional. For example, a lower level MOAB routine that could return MB_TAG_NOT_FOUND should probably not set an error on it, since the caller might expect to get that error code. In this case, the lower level routine just return MB_TAG_NOT_FOUND as a condition, and no error is being set. It is then up to the upper level callers to decide whether it should be a true error or not.
 1.7.6.1
1.7.6.1 
