|
MOAB: Mesh Oriented datABase
(version 5.4.1)
|
|
MOAB: Mesh Oriented datABase
(version 5.4.1)
|
Iterate over leaves of an adaptive kD-tree. More...
#include <AdaptiveKDTree.hpp>
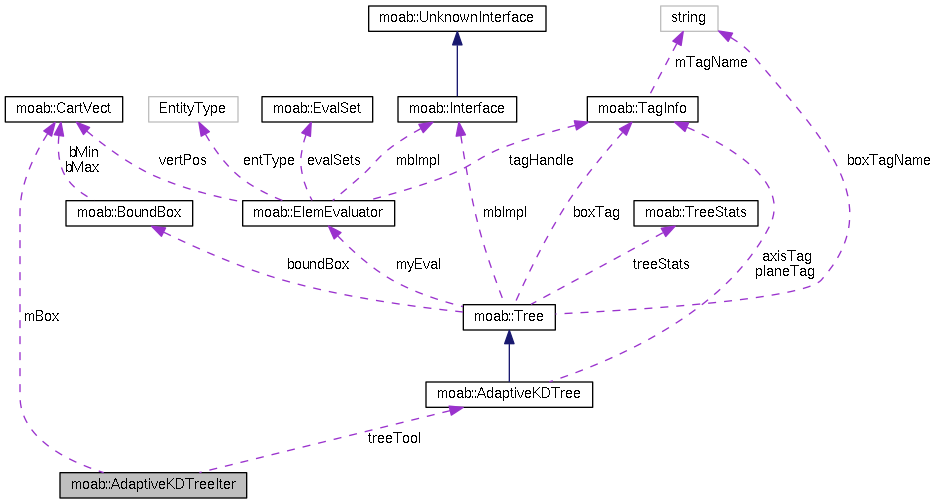
 Collaboration diagram for moab::AdaptiveKDTreeIter:
Collaboration diagram for moab::AdaptiveKDTreeIter:Classes | |
| struct | StackObj |
Public Types | |
| enum | Direction { LEFT = 0, RIGHT = 1 } |
Public Member Functions | |
| AdaptiveKDTreeIter () | |
| ErrorCode | initialize (AdaptiveKDTree *tool, EntityHandle root, const double box_min[3], const double box_max[3], Direction direction) |
| AdaptiveKDTree * | tool () const |
| EntityHandle | handle () const |
| Get handle for current leaf. | |
| const double * | box_min () const |
| Get min corner of axis-aligned box for current leaf. | |
| const double * | box_max () const |
| Get max corner of axis-aligned box for current leaf. | |
| double | volume () const |
| bool | intersects (const AdaptiveKDTree::Plane &plane) const |
| test if a plane intersects the leaf box | |
| unsigned | depth () const |
| Get depth in tree. root is at depth of 1. | |
| ErrorCode | step (Direction direction) |
| ErrorCode | step () |
| ErrorCode | back () |
| ErrorCode | sibling_side (AdaptiveKDTree::Axis &axis_out, bool &neg_out) const |
| ErrorCode | get_neighbors (AdaptiveKDTree::Axis norm, bool neg, std::vector< AdaptiveKDTreeIter > &results, double epsilon=0.0) const |
| ErrorCode | get_parent_split_plane (AdaptiveKDTree::Plane &plane) const |
| Get split plane that separates this node from its immediate sibling. | |
| bool | is_sibling (const AdaptiveKDTreeIter &other_leaf) const |
| bool | is_sibling (EntityHandle other_leaf) const |
| bool | sibling_is_forward () const |
| bool | intersect_ray (const double ray_point[3], const double ray_vect[3], double &t_enter, double &t_exit) const |
Private Types | |
| enum | { BMIN = 0, BMAX = 1 } |
Private Member Functions | |
| ErrorCode | step_to_first_leaf (Direction direction) |
Private Attributes | |
| CartVect | mBox [2] |
| min and max corners of bounding box | |
| AdaptiveKDTree * | treeTool |
| tool for tree | |
| std::vector< StackObj > | mStack |
| stack storing path through tree | |
| std::vector< EntityHandle > | childVect |
| temporary storage of child handles | |
Friends | |
| class | AdaptiveKDTree |
Iterate over leaves of an adaptive kD-tree.
Definition at line 342 of file AdaptiveKDTree.hpp.
anonymous enum [private] |
Definition at line 360 of file AdaptiveKDTree.hpp.
| moab::AdaptiveKDTreeIter::AdaptiveKDTreeIter | ( | ) | [inline] |
Definition at line 378 of file AdaptiveKDTree.hpp.
| ErrorCode moab::AdaptiveKDTreeIter::back | ( | ) | [inline] |
Move back to previous leaf Returns MB_ENTITY_NOT_FOUND if at beginning. Note: steping past the start of the tree will invalidate the iterator. Calling step() will not work.
Definition at line 446 of file AdaptiveKDTree.hpp.
Referenced by get_neighbors(), test_iterator_back(), and test_point_search().
| const double* moab::AdaptiveKDTreeIter::box_max | ( | ) | const [inline] |
Get max corner of axis-aligned box for current leaf.
Definition at line 404 of file AdaptiveKDTree.hpp.
References moab::CartVect::array(), BMAX, and mBox.
Referenced by moab::AdaptiveKDTree::best_subdivision_plane(), moab::AdaptiveKDTree::best_vertex_median_plane(), moab::AdaptiveKDTree::best_vertex_sample_plane(), box_equal(), build_grid(), create_tree(), moab::AdaptiveKDTree::print(), tag_vertices(), test_iterator_back(), test_leaf_merge(), test_point_search(), test_valid_tree(), validate_tree(), and write_tree_blocks().
| const double* moab::AdaptiveKDTreeIter::box_min | ( | ) | const [inline] |
Get min corner of axis-aligned box for current leaf.
Definition at line 398 of file AdaptiveKDTree.hpp.
References moab::CartVect::array(), BMIN, and mBox.
Referenced by moab::AdaptiveKDTree::best_subdivision_plane(), moab::AdaptiveKDTree::best_vertex_median_plane(), moab::AdaptiveKDTree::best_vertex_sample_plane(), box_equal(), build_grid(), create_tree(), moab::AdaptiveKDTree::print(), tag_vertices(), test_iterator_back(), test_leaf_merge(), test_point_search(), test_valid_tree(), validate_tree(), and write_tree_blocks().
| unsigned moab::AdaptiveKDTreeIter::depth | ( | ) | const [inline] |
Get depth in tree. root is at depth of 1.
Definition at line 422 of file AdaptiveKDTree.hpp.
References mStack.
Referenced by build_grid(), moab::AdaptiveKDTree::build_tree(), moab::AdaptiveKDTree::compute_depth(), create_tree(), moab::AdaptiveKDTree::merge_leaf(), moab::AdaptiveKDTree::print(), test_leaf_merge(), test_point_search(), test_valid_tree(), and validate_tree().
{
return mStack.size();
}
| ErrorCode moab::AdaptiveKDTreeIter::get_neighbors | ( | AdaptiveKDTree::Axis | norm, |
| bool | neg, | ||
| std::vector< AdaptiveKDTreeIter > & | results, | ||
| double | epsilon = 0.0 |
||
| ) | const |
Get adjacent leaf nodes on side indicated by norm and neg.
E.g. if norm == X and neg == true, then get neighbor(s) adjacent to the side of the box contained in the plane with normal to the X axis and with the x coordinate equal to the minimum x of the bounding box.
E.g. if norm == Y and neg == false, then get neighbor(s) adjacent to the side of the box with y = maximum y of bounding box.
| norm | Normal vector for box side (X, Y, or Z) |
| neg | Which of two planes with norm (true->smaller coord, false->larger coord) |
| results | List to which to append results. This function does not* clear existing values in list. |
| epsilon | Tolerance on overlap. A positive value E will result in nodes that are separated by as much as E to be considered touching. A negative value -E will cause leaves that do not overlap by at least E to be considered non-overlapping. Amongst other things, this value can be used to control whether or not leaves adjacent at only their edges or corners are returned. |
Definition at line 578 of file AdaptiveKDTree.cpp.
References back(), childVect, moab::AdaptiveKDTree::Plane::coord, moab::AdaptiveKDTreeIter::StackObj::coord, moab::AdaptiveKDTreeIter::StackObj::entity, ErrorCode, MB_SUCCESS, mBox, mStack, and moab::AdaptiveKDTree::Plane::norm.
Referenced by leaf_iterator_test().
{
StackObj node, parent;
ErrorCode rval;
AdaptiveKDTree::Plane plane;
int child_idx;
// Find tree node at which the specified side of the box
// for this node was created.
AdaptiveKDTreeIter iter( *this ); // temporary iterator (don't modify *this)
node = iter.mStack.back();
iter.mStack.pop_back();
for( ;; )
{
// reached the root - original node was on boundary (no neighbors)
if( iter.mStack.empty() ) return MB_SUCCESS;
// get parent node data
parent = iter.mStack.back();
iter.childVect.clear();
rval = treeTool->moab()->get_child_meshsets( parent.entity, iter.childVect );
if( MB_SUCCESS != rval ) return rval;
rval = treeTool->get_split_plane( parent.entity, plane );
if( MB_SUCCESS != rval ) return rval;
child_idx = iter.childVect[0] == node.entity ? 0 : 1;
assert( iter.childVect[child_idx] == node.entity );
// if we found the split plane for the desired side
// push neighbor on stack and stop
if( plane.norm == norm && (int)neg == child_idx )
{
// change from box of previous child to box of parent
iter.mBox[1 - child_idx][plane.norm] = node.coord;
// push other child of parent onto stack
node.entity = iter.childVect[1 - child_idx];
node.coord = iter.mBox[child_idx][plane.norm];
iter.mStack.push_back( node );
// change from parent box to box of new child
iter.mBox[child_idx][plane.norm] = plane.coord;
break;
}
// continue up the tree
iter.mBox[1 - child_idx][plane.norm] = node.coord;
node = parent;
iter.mStack.pop_back();
}
// now move down tree, searching for adjacent boxes
std::vector< AdaptiveKDTreeIter > list;
// loop over all potential paths to neighbors (until list is empty)
for( ;; )
{
// follow a single path to a leaf, append any other potential
// paths to neighbors to 'list'
node = iter.mStack.back();
for( ;; )
{
iter.childVect.clear();
rval = treeTool->moab()->get_child_meshsets( node.entity, iter.childVect );
if( MB_SUCCESS != rval ) return rval;
// if leaf
if( iter.childVect.empty() )
{
results.push_back( iter );
break;
}
rval = treeTool->get_split_plane( node.entity, plane );
if( MB_SUCCESS != rval ) return rval;
// if split parallel to side
if( plane.norm == norm )
{
// continue with whichever child is on the correct side of the split
node.entity = iter.childVect[neg];
node.coord = iter.mBox[1 - neg][plane.norm];
iter.mStack.push_back( node );
iter.mBox[1 - neg][plane.norm] = plane.coord;
}
// if left child is adjacent
else if( this->mBox[BMIN][plane.norm] - plane.coord <= epsilon )
{
// if right child is also adjacent, add to list
if( plane.coord - this->mBox[BMAX][plane.norm] <= epsilon )
{
list.push_back( iter );
list.back().mStack.push_back( StackObj( iter.childVect[1], iter.mBox[BMIN][plane.norm] ) );
list.back().mBox[BMIN][plane.norm] = plane.coord;
}
// continue with left child
node.entity = iter.childVect[0];
node.coord = iter.mBox[BMAX][plane.norm];
iter.mStack.push_back( node );
iter.mBox[BMAX][plane.norm] = plane.coord;
}
// right child is adjacent
else
{
// if left child is not adjacent, right must be or something
// is really messed up.
assert( plane.coord - this->mBox[BMAX][plane.norm] <= epsilon );
// continue with left child
node.entity = iter.childVect[1];
node.coord = iter.mBox[BMIN][plane.norm];
iter.mStack.push_back( node );
iter.mBox[BMIN][plane.norm] = plane.coord;
}
}
if( list.empty() ) break;
iter = list.back();
list.pop_back();
}
return MB_SUCCESS;
}
Get split plane that separates this node from its immediate sibling.
Definition at line 722 of file AdaptiveKDTree.cpp.
References MB_ENTITY_NOT_FOUND.
{
if( mStack.size() < 2 ) // at tree root
return MB_ENTITY_NOT_FOUND;
EntityHandle parent = mStack[mStack.size() - 2].entity;
return tool()->get_split_plane( parent, plane );
}
| EntityHandle moab::AdaptiveKDTreeIter::handle | ( | ) | const [inline] |
Get handle for current leaf.
Definition at line 392 of file AdaptiveKDTree.hpp.
References mStack.
Referenced by moab::AdaptiveKDTree::best_subdivision_plane(), moab::AdaptiveKDTree::best_subdivision_snap_plane(), moab::AdaptiveKDTree::best_vertex_median_plane(), moab::AdaptiveKDTree::best_vertex_sample_plane(), moab::AdaptiveKDTree::build_tree(), moab::AdaptiveKDTree::compute_depth(), create_simple_2d_tree(), create_tree(), moab::MergeMesh::find_merged_to(), is_sibling(), leaf_iterator_test(), moab::AdaptiveKDTree::merge_leaf(), moab::Coupler::nat_param(), moab::AdaptiveKDTree::point_search(), moab::AdaptiveKDTree::print(), moab::AdaptiveKDTree::split_leaf(), tag_elements(), tag_vertices(), test_iterator_back(), test_leaf_merge(), test_leaf_sibling(), test_point_search(), test_tree_merge_nodes(), test_valid_tree(), validate_tree(), and write_tree_blocks().
{
return mStack.back().entity;
}
| ErrorCode moab::AdaptiveKDTreeIter::initialize | ( | AdaptiveKDTree * | tool, |
| EntityHandle | root, | ||
| const double | box_min[3], | ||
| const double | box_max[3], | ||
| Direction | direction | ||
| ) |
Definition at line 475 of file AdaptiveKDTree.cpp.
Referenced by moab::AdaptiveKDTree::build_tree(), moab::AdaptiveKDTree::get_last_iterator(), and moab::AdaptiveKDTree::get_sub_tree_iterator().
| bool moab::AdaptiveKDTreeIter::intersect_ray | ( | const double | ray_point[3], |
| const double | ray_vect[3], | ||
| double & | t_enter, | ||
| double & | t_exit | ||
| ) | const |
Find range of overlap between ray and leaf.
| ray_point | Coordinates of start point of ray |
| ray_vect | Directionion vector for ray such that the ray is defined by r(t) = ray_point + t * ray_vect for t > 0. |
| t_enter | Output: if return value is true, this value is the parameter location along the ray at which the ray entered the leaf. If return value is false, then this value is undefined. |
| t_exit | Output: if return value is true, this value is the parameter location along the ray at which the ray exited the leaf. If return value is false, then this value is undefined. |
Definition at line 767 of file AdaptiveKDTree.cpp.
References box_max(), box_min(), and moab::GeomUtil::ray_box_intersect().
Referenced by test_leaf_intersects_ray().
{
treeTool->treeStats.traversalLeafObjectTests++;
return GeomUtil::ray_box_intersect( CartVect( box_min() ), CartVect( box_max() ), CartVect( ray_point ),
CartVect( ray_vect ), t_enter, t_exit );
}
| bool moab::AdaptiveKDTreeIter::intersects | ( | const AdaptiveKDTree::Plane & | plane | ) | const [inline] |
test if a plane intersects the leaf box
Definition at line 416 of file AdaptiveKDTree.hpp.
References BMAX, BMIN, moab::AdaptiveKDTree::Plane::coord, mBox, and moab::AdaptiveKDTree::Plane::norm.
Referenced by test_leaf_intersects_plane().
| bool moab::AdaptiveKDTreeIter::is_sibling | ( | const AdaptiveKDTreeIter & | other_leaf | ) | const |
Return true if thos node and the passed node share the same immediate parent.
Definition at line 731 of file AdaptiveKDTree.cpp.
References handle(), and mStack.
Referenced by test_leaf_sibling().
| bool moab::AdaptiveKDTreeIter::is_sibling | ( | EntityHandle | other_leaf | ) | const |
Return true if thos node and the passed node share the same immediate parent.
Definition at line 738 of file AdaptiveKDTree.cpp.
References ErrorCode, and MB_SUCCESS.
{
if( mStack.size() < 2 || other_leaf == handle() ) return false;
EntityHandle parent = mStack[mStack.size() - 2].entity;
childVect.clear();
ErrorCode rval = tool()->moab()->get_child_meshsets( parent, childVect );
if( MB_SUCCESS != rval || childVect.size() != 2 )
{
assert( false );
return false;
}
return childVect[0] == other_leaf || childVect[1] == other_leaf;
}
| bool moab::AdaptiveKDTreeIter::sibling_is_forward | ( | ) | const |
Returns true if calling step() will advance to the immediate sibling of the current node. Returns false if current node is root or back() will move to the immediate sibling.
Definition at line 752 of file AdaptiveKDTree.cpp.
References ErrorCode, and MB_SUCCESS.
Referenced by test_leaf_sibling().
{
if( mStack.size() < 2 ) // if root
return false;
EntityHandle parent = mStack[mStack.size() - 2].entity;
childVect.clear();
ErrorCode rval = tool()->moab()->get_child_meshsets( parent, childVect );
if( MB_SUCCESS != rval || childVect.size() != 2 )
{
assert( false );
return false;
}
return childVect[0] == handle();
}
| ErrorCode moab::AdaptiveKDTreeIter::sibling_side | ( | AdaptiveKDTree::Axis & | axis_out, |
| bool & | neg_out | ||
| ) | const |
Return the side of the box bounding this tree node that is shared with the immediately adjacent sibling (the tree node that shares a common parent node with this node in the binary tree.)
| axis_out | The principal axis orthogonal to the side of the box |
| neg_out | true if the side of the box is toward the decreasing direction of the principal axis indicated by axis_out, false if it is toward the increasing direction. |
Definition at line 702 of file AdaptiveKDTree.cpp.
References ErrorCode, MB_ENTITY_NOT_FOUND, MB_SUCCESS, and moab::AdaptiveKDTree::Plane::norm.
{
if( mStack.size() < 2 ) // at tree root
return MB_ENTITY_NOT_FOUND;
EntityHandle parent = mStack[mStack.size() - 2].entity;
AdaptiveKDTree::Plane plane;
ErrorCode rval = tool()->get_split_plane( parent, plane );
if( MB_SUCCESS != rval ) return MB_FAILURE;
childVect.clear();
rval = tool()->moab()->get_child_meshsets( parent, childVect );
if( MB_SUCCESS != rval || childVect.size() != 2 ) return MB_FAILURE;
axis_out = static_cast< AdaptiveKDTree::Axis >( plane.norm );
neg_out = ( childVect[1] == handle() );
assert( childVect[neg_out] == handle() );
return MB_SUCCESS;
}
| ErrorCode moab::AdaptiveKDTreeIter::step | ( | Direction | direction | ) |
Advance the iterator either left or right in the tree Note: stepping past the end of the tree will invalidate the iterator. It will *not* be work step the other direction.
Definition at line 520 of file AdaptiveKDTree.cpp.
References moab::AdaptiveKDTree::Plane::coord, moab::AdaptiveKDTreeIter::StackObj::coord, moab::AdaptiveKDTreeIter::StackObj::entity, ErrorCode, MB_ENTITY_NOT_FOUND, MB_SUCCESS, and moab::AdaptiveKDTree::Plane::norm.
Referenced by build_grid(), moab::AdaptiveKDTree::build_tree(), moab::AdaptiveKDTree::compute_depth(), create_simple_2d_tree(), create_tree(), moab::MergeMesh::find_merged_to(), leaf_iterator_test(), moab::AdaptiveKDTree::print(), tag_elements(), tag_vertices(), test_iterator_back(), test_leaf_merge(), test_leaf_sibling(), test_leaf_volume(), test_point_search(), test_tree_merge_nodes(), test_valid_tree(), validate_tree(), and write_tree_blocks().
{
StackObj node, parent;
ErrorCode rval;
AdaptiveKDTree::Plane plane;
const Direction opposite = static_cast< Direction >( 1 - direction );
// If stack is empty, then either this iterator is uninitialized
// or we reached the end of the iteration (and return
// MB_ENTITY_NOT_FOUND) already.
if( mStack.empty() ) return MB_FAILURE;
// Pop the current node from the stack.
// The stack should then contain the parent of the current node.
// If the stack is empty after this pop, then we've reached the end.
node = mStack.back();
mStack.pop_back();
treeTool->treeStats.nodesVisited++;
if( mStack.empty() ) treeTool->treeStats.leavesVisited++;
while( !mStack.empty() )
{
// Get data for parent entity
parent = mStack.back();
childVect.clear();
rval = treeTool->moab()->get_child_meshsets( parent.entity, childVect );
if( MB_SUCCESS != rval ) return rval;
rval = treeTool->get_split_plane( parent.entity, plane );
if( MB_SUCCESS != rval ) return rval;
// If we're at the left child
if( childVect[opposite] == node.entity )
{
// change from box of left child to box of parent
mBox[direction][plane.norm] = node.coord;
// push right child on stack
node.entity = childVect[direction];
treeTool->treeStats.nodesVisited++; // changed node
node.coord = mBox[opposite][plane.norm];
mStack.push_back( node );
// change from box of parent to box of right child
mBox[opposite][plane.norm] = plane.coord;
// descend to left-most leaf of the right child
return step_to_first_leaf( opposite );
}
// The current node is the right child of the parent,
// continue up the tree.
assert( childVect[direction] == node.entity );
mBox[opposite][plane.norm] = node.coord;
node = parent;
treeTool->treeStats.nodesVisited++;
mStack.pop_back();
}
return MB_ENTITY_NOT_FOUND;
}
| ErrorCode moab::AdaptiveKDTreeIter::step | ( | ) | [inline] |
| ErrorCode moab::AdaptiveKDTreeIter::step_to_first_leaf | ( | Direction | direction | ) | [private] |
Descend tree to left most leaf from current position No-op if at leaf.
Definition at line 493 of file AdaptiveKDTree.cpp.
References moab::AdaptiveKDTree::Plane::coord, ErrorCode, MB_SUCCESS, and moab::AdaptiveKDTree::Plane::norm.
Referenced by moab::AdaptiveKDTree::compute_depth(), and moab::AdaptiveKDTree::split_leaf().
{
ErrorCode rval;
AdaptiveKDTree::Plane plane;
const Direction opposite = static_cast< Direction >( 1 - direction );
for( ;; )
{
childVect.clear();
treeTool->treeStats.nodesVisited++; // not sure whether this is the visit or the push_back below
rval = treeTool->moab()->get_child_meshsets( mStack.back().entity, childVect );
if( MB_SUCCESS != rval ) return rval;
if( childVect.empty() )
{ // leaf
treeTool->treeStats.leavesVisited++;
break;
}
rval = treeTool->get_split_plane( mStack.back().entity, plane );
if( MB_SUCCESS != rval ) return rval;
mStack.push_back( StackObj( childVect[direction], mBox[opposite][plane.norm] ) );
mBox[opposite][plane.norm] = plane.coord;
}
return MB_SUCCESS;
}
| AdaptiveKDTree* moab::AdaptiveKDTreeIter::tool | ( | ) | const [inline] |
Definition at line 386 of file AdaptiveKDTree.hpp.
References treeTool.
Referenced by moab::AdaptiveKDTree::best_subdivision_plane(), moab::AdaptiveKDTree::best_subdivision_snap_plane(), moab::AdaptiveKDTree::best_vertex_median_plane(), and moab::AdaptiveKDTree::best_vertex_sample_plane().
{
return treeTool;
}
| double moab::AdaptiveKDTreeIter::volume | ( | ) | const [inline] |
friend class AdaptiveKDTree [friend] |
Definition at line 375 of file AdaptiveKDTree.hpp.
std::vector< EntityHandle > moab::AdaptiveKDTreeIter::childVect [mutable, private] |
temporary storage of child handles
Definition at line 369 of file AdaptiveKDTree.hpp.
Referenced by get_neighbors(), moab::AdaptiveKDTree::merge_leaf(), and moab::AdaptiveKDTree::point_search().
CartVect moab::AdaptiveKDTreeIter::mBox[2] [private] |
min and max corners of bounding box
Definition at line 366 of file AdaptiveKDTree.hpp.
Referenced by box_max(), box_min(), get_neighbors(), intersects(), moab::AdaptiveKDTree::merge_leaf(), moab::AdaptiveKDTree::point_search(), and volume().
std::vector< StackObj > moab::AdaptiveKDTreeIter::mStack [private] |
stack storing path through tree
Definition at line 368 of file AdaptiveKDTree.hpp.
Referenced by depth(), get_neighbors(), handle(), is_sibling(), moab::AdaptiveKDTree::merge_leaf(), and moab::AdaptiveKDTree::point_search().
AdaptiveKDTree* moab::AdaptiveKDTreeIter::treeTool [private] |
tool for tree
Definition at line 367 of file AdaptiveKDTree.hpp.
Referenced by moab::AdaptiveKDTree::point_search(), and tool().
 1.7.6.1
1.7.6.1