|
MOAB
4.9.3pre
|
|
MOAB
4.9.3pre
|
Modified Incomplete Cholesky with dual threshold. More...
#include <IncompleteCholesky.h>

Public Types | |
| enum | { UpLo = _UpLo } |
| enum | { ColsAtCompileTime = Dynamic, MaxColsAtCompileTime = Dynamic } |
| typedef NumTraits< Scalar >::Real | RealScalar |
| typedef _OrderingType | OrderingType |
| typedef OrderingType::PermutationType | PermutationType |
| typedef PermutationType::StorageIndex | StorageIndex |
| typedef SparseMatrix< Scalar, ColMajor, StorageIndex > | FactorType |
| typedef Matrix< Scalar, Dynamic, 1 > | VectorSx |
| typedef Matrix< RealScalar, Dynamic, 1 > | VectorRx |
| typedef Matrix< StorageIndex, Dynamic, 1 > | VectorIx |
| typedef std::vector< std::list < StorageIndex > > | VectorList |
Public Member Functions | |
| IncompleteCholesky () | |
| template<typename MatrixType > | |
| IncompleteCholesky (const MatrixType &matrix) | |
| Index | rows () const |
| Index | cols () const |
| ComputationInfo | info () const |
| Reports whether previous computation was successful. | |
| void | setInitialShift (RealScalar shift) |
Set the initial shift parameter  . . | |
| template<typename MatrixType > | |
| void | analyzePattern (const MatrixType &mat) |
| Computes the fill reducing permutation vector using the sparsity pattern of mat. | |
| template<typename MatrixType > | |
| void | factorize (const MatrixType &mat) |
| Performs the numerical factorization of the input matrix mat. | |
| template<typename MatrixType > | |
| void | compute (const MatrixType &mat) |
| template<typename Rhs , typename Dest > | |
| void | _solve_impl (const Rhs &b, Dest &x) const |
| const FactorType & | matrixL () const |
| const VectorRx & | scalingS () const |
| const PermutationType & | permutationP () const |
| template<typename _MatrixType > | |
| void | factorize (const _MatrixType &mat) |
Protected Types | |
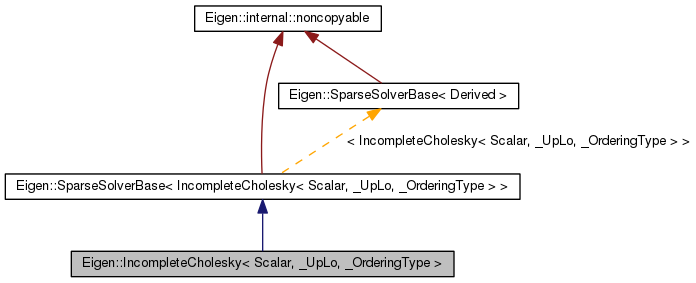
| typedef SparseSolverBase < IncompleteCholesky< Scalar, _UpLo, _OrderingType > > | Base |
Protected Attributes | |
| FactorType | m_L |
| VectorRx | m_scale |
| RealScalar | m_initialShift |
| bool | m_analysisIsOk |
| bool | m_factorizationIsOk |
| ComputationInfo | m_info |
| PermutationType | m_perm |
Private Member Functions | |
| void | updateList (Ref< const VectorIx > colPtr, Ref< VectorIx > rowIdx, Ref< VectorSx > vals, const Index &col, const Index &jk, VectorIx &firstElt, VectorList &listCol) |
Modified Incomplete Cholesky with dual threshold.
References : C-J. Lin and J. J. Moré, Incomplete Cholesky Factorizations with Limited memory, SIAM J. Sci. Comput. 21(1), pp. 24-45, 1999
| Scalar | the scalar type of the input matrices |
| _UpLo | The triangular part that will be used for the computations. It can be Lower or Upper. Default is Lower. |
| _OrderingType | The ordering method to use, either AMDOrdering<> or NaturalOrdering<>. Default is AMDOrdering<int>, unless EIGEN_MPL2_ONLY is defined, in which case the default is NaturalOrdering<int>. |
It performs the following incomplete factorization:  where L is a lower triangular factor, S is a diagonal scaling matrix, and P is a fill-in reducing permutation as computed by the ordering method.
where L is a lower triangular factor, S is a diagonal scaling matrix, and P is a fill-in reducing permutation as computed by the ordering method.
Shifting strategy: Let  be the scaled matrix on which the factorization is carried out, and
be the scaled matrix on which the factorization is carried out, and  be the minimum value of the diagonal. If
be the minimum value of the diagonal. If  then, the factorization is directly performed on the matrix B. Otherwise, the factorization is performed on the shifted matrix
then, the factorization is directly performed on the matrix B. Otherwise, the factorization is performed on the shifted matrix  where is the initial shift value as returned and set by setInitialShift() method. The default value is
where is the initial shift value as returned and set by setInitialShift() method. The default value is  . If the factorization fails, then the shift in doubled until it succeed or a maximum of ten attempts. If it still fails, as returned by the info() method, then you can either increase the initial shift, or better use another preconditioning technique.
. If the factorization fails, then the shift in doubled until it succeed or a maximum of ten attempts. If it still fails, as returned by the info() method, then you can either increase the initial shift, or better use another preconditioning technique.
Definition at line 51 of file IncompleteCholesky.h.
typedef SparseSolverBase<IncompleteCholesky<Scalar,_UpLo,_OrderingType> > Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::Base [protected] |
Definition at line 54 of file IncompleteCholesky.h.
| typedef SparseMatrix<Scalar,ColMajor,StorageIndex> Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::FactorType |
Definition at line 61 of file IncompleteCholesky.h.
| typedef _OrderingType Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::OrderingType |
Definition at line 58 of file IncompleteCholesky.h.
| typedef OrderingType::PermutationType Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::PermutationType |
Definition at line 59 of file IncompleteCholesky.h.
| typedef NumTraits<Scalar>::Real Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::RealScalar |
Definition at line 57 of file IncompleteCholesky.h.
| typedef PermutationType::StorageIndex Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::StorageIndex |
Definition at line 60 of file IncompleteCholesky.h.
| typedef Matrix<StorageIndex,Dynamic, 1> Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::VectorIx |
Definition at line 64 of file IncompleteCholesky.h.
| typedef std::vector<std::list<StorageIndex> > Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::VectorList |
Definition at line 65 of file IncompleteCholesky.h.
| typedef Matrix<RealScalar,Dynamic,1> Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::VectorRx |
Definition at line 63 of file IncompleteCholesky.h.
| typedef Matrix<Scalar,Dynamic,1> Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::VectorSx |
Definition at line 62 of file IncompleteCholesky.h.
| anonymous enum |
| anonymous enum |
Definition at line 67 of file IncompleteCholesky.h.
{
ColsAtCompileTime = Dynamic,
MaxColsAtCompileTime = Dynamic
};
| Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::IncompleteCholesky | ( | ) | [inline] |
Default constructor leaving the object in a partly non-initialized stage.
You must call compute() or the pair analyzePattern()/factorize() to make it valid.
Definition at line 79 of file IncompleteCholesky.h.
: m_initialShift(1e-3),m_factorizationIsOk(false) {}
| Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::IncompleteCholesky | ( | const MatrixType & | matrix | ) | [inline] |
Constructor computing the incomplete factorization for the given matrix matrix.
Definition at line 84 of file IncompleteCholesky.h.
: m_initialShift(1e-3),m_factorizationIsOk(false) { compute(matrix); }
| void Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::_solve_impl | ( | const Rhs & | b, |
| Dest & | x | ||
| ) | const [inline] |
Definition at line 155 of file IncompleteCholesky.h.
{
eigen_assert(m_factorizationIsOk && "factorize() should be called first");
if (m_perm.rows() == b.rows()) x = m_perm * b;
else x = b;
x = m_scale.asDiagonal() * x;
x = m_L.template triangularView<Lower>().solve(x);
x = m_L.adjoint().template triangularView<Upper>().solve(x);
x = m_scale.asDiagonal() * x;
if (m_perm.rows() == b.rows())
x = m_perm.inverse() * x;
}
| void Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::analyzePattern | ( | const MatrixType & | mat | ) | [inline] |
Computes the fill reducing permutation vector using the sparsity pattern of mat.
Definition at line 117 of file IncompleteCholesky.h.
{
OrderingType ord;
PermutationType pinv;
ord(mat.template selfadjointView<UpLo>(), pinv);
if(pinv.size()>0) m_perm = pinv.inverse();
else m_perm.resize(0);
m_L.resize(mat.rows(), mat.cols());
m_analysisIsOk = true;
m_isInitialized = true;
m_info = Success;
}
| Index Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::cols | ( | void | ) | const [inline] |
Definition at line 93 of file IncompleteCholesky.h.
| void Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::compute | ( | const MatrixType & | mat | ) | [inline] |
Computes or re-computes the incomplete Cholesky factorization of the input matrix mat
It is a shortcut for a sequential call to the analyzePattern() and factorize() methods.
Definition at line 147 of file IncompleteCholesky.h.
{
analyzePattern(mat);
factorize(mat);
}
| void Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::factorize | ( | const MatrixType & | mat | ) |
Performs the numerical factorization of the input matrix mat.
The method analyzePattern() or compute() must have been called beforehand with a matrix having the same pattern.
| void Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::factorize | ( | const _MatrixType & | mat | ) |
Definition at line 196 of file IncompleteCholesky.h.
{
using std::sqrt;
eigen_assert(m_analysisIsOk && "analyzePattern() should be called first");
// Dropping strategy : Keep only the p largest elements per column, where p is the number of elements in the column of the original matrix. Other strategies will be added
// Apply the fill-reducing permutation computed in analyzePattern()
if (m_perm.rows() == mat.rows() ) // To detect the null permutation
{
// The temporary is needed to make sure that the diagonal entry is properly sorted
FactorType tmp(mat.rows(), mat.cols());
tmp = mat.template selfadjointView<_UpLo>().twistedBy(m_perm);
m_L.template selfadjointView<Lower>() = tmp.template selfadjointView<Lower>();
}
else
{
m_L.template selfadjointView<Lower>() = mat.template selfadjointView<_UpLo>();
}
Index n = m_L.cols();
Index nnz = m_L.nonZeros();
Map<VectorSx> vals(m_L.valuePtr(), nnz); //values
Map<VectorIx> rowIdx(m_L.innerIndexPtr(), nnz); //Row indices
Map<VectorIx> colPtr( m_L.outerIndexPtr(), n+1); // Pointer to the beginning of each row
VectorIx firstElt(n-1); // for each j, points to the next entry in vals that will be used in the factorization
VectorList listCol(n); // listCol(j) is a linked list of columns to update column j
VectorSx col_vals(n); // Store a nonzero values in each column
VectorIx col_irow(n); // Row indices of nonzero elements in each column
VectorIx col_pattern(n);
col_pattern.fill(-1);
StorageIndex col_nnz;
// Computes the scaling factors
m_scale.resize(n);
m_scale.setZero();
for (Index j = 0; j < n; j++)
for (Index k = colPtr[j]; k < colPtr[j+1]; k++)
{
m_scale(j) += numext::abs2(vals(k));
if(rowIdx[k]!=j)
m_scale(rowIdx[k]) += numext::abs2(vals(k));
}
m_scale = m_scale.cwiseSqrt().cwiseSqrt();
for (Index j = 0; j < n; ++j)
if(m_scale(j)>(std::numeric_limits<RealScalar>::min)())
m_scale(j) = RealScalar(1)/m_scale(j);
else
m_scale(j) = 1;
// TODO disable scaling if not needed, i.e., if it is roughly uniform? (this will make solve() faster)
// Scale and compute the shift for the matrix
RealScalar mindiag = NumTraits<RealScalar>::highest();
for (Index j = 0; j < n; j++)
{
for (Index k = colPtr[j]; k < colPtr[j+1]; k++)
vals[k] *= (m_scale(j)*m_scale(rowIdx[k]));
eigen_internal_assert(rowIdx[colPtr[j]]==j && "IncompleteCholesky: only the lower triangular part must be stored");
mindiag = numext::mini(numext::real(vals[colPtr[j]]), mindiag);
}
FactorType L_save = m_L;
RealScalar shift = 0;
if(mindiag <= RealScalar(0.))
shift = m_initialShift - mindiag;
m_info = NumericalIssue;
// Try to perform the incomplete factorization using the current shift
int iter = 0;
do
{
// Apply the shift to the diagonal elements of the matrix
for (Index j = 0; j < n; j++)
vals[colPtr[j]] += shift;
// jki version of the Cholesky factorization
Index j=0;
for (; j < n; ++j)
{
// Left-looking factorization of the j-th column
// First, load the j-th column into col_vals
Scalar diag = vals[colPtr[j]]; // It is assumed that only the lower part is stored
col_nnz = 0;
for (Index i = colPtr[j] + 1; i < colPtr[j+1]; i++)
{
StorageIndex l = rowIdx[i];
col_vals(col_nnz) = vals[i];
col_irow(col_nnz) = l;
col_pattern(l) = col_nnz;
col_nnz++;
}
{
typename std::list<StorageIndex>::iterator k;
// Browse all previous columns that will update column j
for(k = listCol[j].begin(); k != listCol[j].end(); k++)
{
Index jk = firstElt(*k); // First element to use in the column
eigen_internal_assert(rowIdx[jk]==j);
Scalar v_j_jk = numext::conj(vals[jk]);
jk += 1;
for (Index i = jk; i < colPtr[*k+1]; i++)
{
StorageIndex l = rowIdx[i];
if(col_pattern[l]<0)
{
col_vals(col_nnz) = vals[i] * v_j_jk;
col_irow[col_nnz] = l;
col_pattern(l) = col_nnz;
col_nnz++;
}
else
col_vals(col_pattern[l]) -= vals[i] * v_j_jk;
}
updateList(colPtr,rowIdx,vals, *k, jk, firstElt, listCol);
}
}
// Scale the current column
if(numext::real(diag) <= 0)
{
if(++iter>=10)
return;
// increase shift
shift = numext::maxi(m_initialShift,RealScalar(2)*shift);
// restore m_L, col_pattern, and listCol
vals = Map<const VectorSx>(L_save.valuePtr(), nnz);
rowIdx = Map<const VectorIx>(L_save.innerIndexPtr(), nnz);
colPtr = Map<const VectorIx>(L_save.outerIndexPtr(), n+1);
col_pattern.fill(-1);
for(Index i=0; i<n; ++i)
listCol[i].clear();
break;
}
RealScalar rdiag = sqrt(numext::real(diag));
vals[colPtr[j]] = rdiag;
for (Index k = 0; k<col_nnz; ++k)
{
Index i = col_irow[k];
//Scale
col_vals(k) /= rdiag;
//Update the remaining diagonals with col_vals
vals[colPtr[i]] -= numext::abs2(col_vals(k));
}
// Select the largest p elements
// p is the original number of elements in the column (without the diagonal)
Index p = colPtr[j+1] - colPtr[j] - 1 ;
Ref<VectorSx> cvals = col_vals.head(col_nnz);
Ref<VectorIx> cirow = col_irow.head(col_nnz);
internal::QuickSplit(cvals,cirow, p);
// Insert the largest p elements in the matrix
Index cpt = 0;
for (Index i = colPtr[j]+1; i < colPtr[j+1]; i++)
{
vals[i] = col_vals(cpt);
rowIdx[i] = col_irow(cpt);
// restore col_pattern:
col_pattern(col_irow(cpt)) = -1;
cpt++;
}
// Get the first smallest row index and put it after the diagonal element
Index jk = colPtr(j)+1;
updateList(colPtr,rowIdx,vals,j,jk,firstElt,listCol);
}
if(j==n)
{
m_factorizationIsOk = true;
m_info = Success;
}
} while(m_info!=Success);
}
| ComputationInfo Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::info | ( | ) | const [inline] |
Reports whether previous computation was successful.
It triggers an assertion if *this has not been initialized through the respective constructor, or a call to compute() or analyzePattern().
Success if computation was successful, NumericalIssue if the matrix appears to be negative. Definition at line 104 of file IncompleteCholesky.h.
{
eigen_assert(m_isInitialized && "IncompleteCholesky is not initialized.");
return m_info;
}
| const FactorType& Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::matrixL | ( | ) | const [inline] |
Definition at line 169 of file IncompleteCholesky.h.
{ eigen_assert("m_factorizationIsOk"); return m_L; }
| const PermutationType& Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::permutationP | ( | ) | const [inline] |
Definition at line 175 of file IncompleteCholesky.h.
{ eigen_assert("m_analysisIsOk"); return m_perm; }
| Index Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::rows | ( | void | ) | const [inline] |
Definition at line 90 of file IncompleteCholesky.h.
| const VectorRx& Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::scalingS | ( | ) | const [inline] |
Definition at line 172 of file IncompleteCholesky.h.
{ eigen_assert("m_factorizationIsOk"); return m_scale; }
| void Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::setInitialShift | ( | RealScalar | shift | ) | [inline] |
Set the initial shift parameter .
Definition at line 112 of file IncompleteCholesky.h.
{ m_initialShift = shift; }
| void Eigen::IncompleteCholesky< Scalar, _UpLo, OrderingType >::updateList | ( | Ref< const VectorIx > | colPtr, |
| Ref< VectorIx > | rowIdx, | ||
| Ref< VectorSx > | vals, | ||
| const Index & | col, | ||
| const Index & | jk, | ||
| VectorIx & | firstElt, | ||
| VectorList & | listCol | ||
| ) | [inline, private] |
Definition at line 379 of file IncompleteCholesky.h.
{
if (jk < colPtr(col+1) )
{
Index p = colPtr(col+1) - jk;
Index minpos;
rowIdx.segment(jk,p).minCoeff(&minpos);
minpos += jk;
if (rowIdx(minpos) != rowIdx(jk))
{
//Swap
std::swap(rowIdx(jk),rowIdx(minpos));
std::swap(vals(jk),vals(minpos));
}
firstElt(col) = internal::convert_index<StorageIndex,Index>(jk);
listCol[rowIdx(jk)].push_back(internal::convert_index<StorageIndex,Index>(col));
}
}
bool Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::m_analysisIsOk [protected] |
Definition at line 181 of file IncompleteCholesky.h.
bool Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::m_factorizationIsOk [protected] |
Definition at line 182 of file IncompleteCholesky.h.
ComputationInfo Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::m_info [protected] |
Definition at line 183 of file IncompleteCholesky.h.
RealScalar Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::m_initialShift [protected] |
Definition at line 180 of file IncompleteCholesky.h.
FactorType Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::m_L [protected] |
Definition at line 178 of file IncompleteCholesky.h.
PermutationType Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::m_perm [protected] |
Definition at line 184 of file IncompleteCholesky.h.
VectorRx Eigen::IncompleteCholesky< Scalar, _UpLo, _OrderingType >::m_scale [protected] |
Definition at line 179 of file IncompleteCholesky.h.
 1.7.6.1
1.7.6.1 
