|
MOAB: Mesh Oriented datABase
(version 5.4.1)
|
|
MOAB: Mesh Oriented datABase
(version 5.4.1)
|
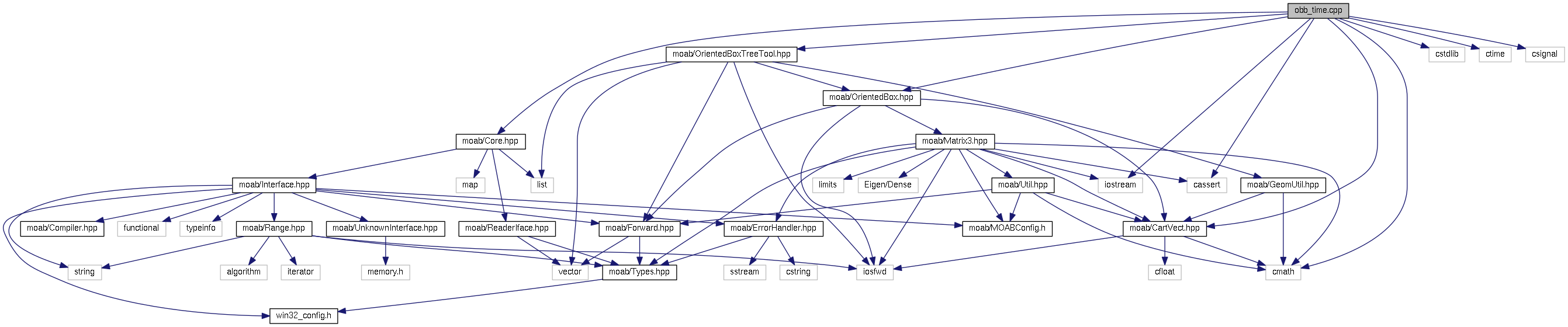
#include "moab/Core.hpp"#include "moab/CartVect.hpp"#include "moab/OrientedBox.hpp"#include "moab/OrientedBoxTreeTool.hpp"#include <cstdlib>#include <iostream>#include <cmath>#include <ctime>#include <csignal>#include <cassert> Include dependency graph for obb_time.cpp:
Include dependency graph for obb_time.cpp:Go to the source code of this file.
Functions | |
| static void | usage () |
| void | generate_ray (const CartVect &sphere_center, double sphere_radius, CartVect &point, CartVect &dir) |
| ErrorCode | read_tree (Interface *instance, const char *filename, EntityHandle &tree_root_out) |
| void | signal_handler (int) |
| int | main (int argc, char *argv[]) |
Variables | |
| const int | NUM_RAYS = 40000 |
| const int | NUM_XSCT = 20000 |
| int | num_rays = NUM_RAYS |
| int | num_xsct = NUM_XSCT |
| const char * | filename = 0 |
| bool | do_sets = false |
| bool | do_trv_stats = false |
| int | rays = 0 |
| int | xsct = 0 |
| int | gen = 0 |
| clock_t | ttimer |
| void generate_ray | ( | const CartVect & | sphere_center, |
| double | sphere_radius, | ||
| CartVect & | point, | ||
| CartVect & | dir | ||
| ) |
Definition at line 31 of file obb_time.cpp.
References moab::CartVect::normalize().
Referenced by main().
{
const int H = RAND_MAX / 2;
point[0] = (double)rand() / H - 1;
point[1] = (double)rand() / H - 1;
point[2] = (double)rand() / H - 1;
point *= sphere_radius;
dir[0] = (double)rand() * -point[0];
dir[1] = (double)rand() * -point[1];
dir[2] = (double)rand() * -point[2];
dir.normalize();
point += sphere_center;
}
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 84 of file obb_time.cpp.
References moab::CartVect::array(), moab::OrientedBoxTreeTool::box(), box(), moab::OrientedBox::center, do_sets, do_trv_stats, ErrorCode, filename, gen, generate_ray(), iface, MB_SUCCESS, num_rays, num_xsct, moab::OrientedBox::outer_radius(), moab::OrientedBoxTreeTool::TrvStats::print(), moab::OrientedBoxTreeTool::ray_intersect_sets(), moab::OrientedBoxTreeTool::ray_intersect_triangles(), rays, read_tree(), signal_handler(), ttimer, usage, and xsct.
{
signal( SIGINT, &signal_handler );
for( int i = 1; i < argc; ++i )
{
if( !strcmp( argv[i], "-r" ) )
{
++i;
if( i == argc || !argv[i][0] )
{
std::cerr << "Expected value following '-r'" << std::endl;
usage();
}
char* end;
long t1 = strtol( argv[i], &end, 0 );
num_rays = (int)t1;
if( *end || t1 < 0 || num_rays != t1 )
{
std::cerr << "Expected positive integer following '-r'" << std::endl;
usage();
}
}
else if( !strcmp( argv[i], "-i" ) )
{
++i;
if( i == argc || !argv[i][0] )
{
std::cerr << "Expected value following '-i'" << std::endl;
usage();
}
char* end;
long t1 = strtol( argv[i], &end, 0 );
num_xsct = (int)t1;
if( *end || t1 < 0 || num_xsct != t1 )
{
std::cerr << "Expected positive integer following '-i'" << std::endl;
usage();
}
}
else if( !strcmp( argv[i], "-s" ) )
{
do_sets = true;
}
else if( !strcmp( argv[i], "-p" ) )
{
do_trv_stats = true;
}
else if( filename )
{
std::cerr << "Invalid options or multiple file names specified." << std::endl;
usage();
}
else
{
filename = argv[i];
}
}
if( !filename )
{
std::cerr << "No file name specified." << std::endl;
usage();
}
Core instance;
Interface* iface = &instance;
EntityHandle root;
ErrorCode rval = read_tree( iface, filename, root );
if( MB_SUCCESS != rval )
{
std::cerr << "Failed to read \"" << filename << '"' << std::endl;
return 2;
}
OrientedBoxTreeTool tool( iface );
OrientedBox box;
rval = tool.box( root, box );
if( MB_SUCCESS != rval )
{
std::cerr << "Corrupt tree. Cannot get box for root node." << std::endl;
return 3;
}
OrientedBoxTreeTool::TrvStats* stats = NULL;
if( do_trv_stats )
{
stats = new OrientedBoxTreeTool::TrvStats;
}
const unsigned cached = 1000;
std::vector< double > intersections;
std::vector< EntityHandle > sets, facets;
CartVect point, dir;
std::vector< CartVect > randrays;
randrays.reserve( cached );
int cached_idx = 0;
ttimer = clock();
for( ;; )
{
if( !num_rays )
{
if( xsct >= num_xsct ) break;
}
else if( !num_xsct )
{
if( rays >= num_rays ) break;
}
else if( rays >= num_rays && xsct >= num_xsct )
break;
++rays;
if( randrays.size() < cached )
{
generate_ray( box.center, box.outer_radius(), point, dir );
++gen;
}
else
{
point = randrays[cached_idx++];
dir = randrays[cached_idx++];
cached_idx = cached_idx % randrays.size();
}
intersections.clear();
if( do_sets )
{
sets.clear();
facets.clear();
OrientedBoxTreeTool::IntersectSearchWindow search_win;
OrientedBoxTreeTool::IntRegCtxt int_reg_ctxt;
rval = tool.ray_intersect_sets( intersections, sets, facets, root, 1e-6, point.array(), dir.array(),
search_win, int_reg_ctxt, stats );
}
else
{
rval =
tool.ray_intersect_triangles( intersections, facets, root, 1e-6, point.array(), dir.array(), 0, stats );
}
if( MB_SUCCESS != rval )
{
std::cerr << "Rayfire #" << rays << " failed." << std::endl;
return 4;
}
if( !intersections.empty() )
{
++xsct;
}
if( randrays.size() < cached && ( !intersections.empty() || !num_xsct || xsct >= num_xsct ) )
{
randrays.push_back( point );
randrays.push_back( dir );
}
}
ttimer = clock() - ttimer;
std::cout << rays << " ray fires done" << std::endl
<< gen << " unique rays used" << std::endl
<< xsct << " intersecting fires" << std::endl
<< (double)ttimer / CLOCKS_PER_SEC << " seconds" << std::endl;
if( do_trv_stats )
{
std::cout << "Traversal statistics: " << std::endl;
stats->print( std::cout );
}
return 0;
}
| ErrorCode read_tree | ( | Interface * | instance, |
| const char * | filename, | ||
| EntityHandle & | tree_root_out | ||
| ) |
Definition at line 47 of file obb_time.cpp.
References ErrorCode, moab::Interface::load_mesh(), MB_SUCCESS, MB_TYPE_HANDLE, moab::Interface::tag_get_data(), and moab::Interface::tag_get_handle().
Referenced by main().
{
ErrorCode rval = instance->load_mesh( filename );
if( MB_SUCCESS != rval ) return rval;
Tag tag;
rval = instance->tag_get_handle( "OBB_ROOT", 1, MB_TYPE_HANDLE, tag );
if( MB_SUCCESS != rval ) return rval;
const EntityHandle root = 0;
return instance->tag_get_data( tag, &root, 1, &tree_root_out );
}
| void signal_handler | ( | int | ) |
Definition at line 72 of file obb_time.cpp.
References filename, gen, num_rays, num_xsct, rays, ttimer, and xsct.
Referenced by main().
{
ttimer = clock() - ttimer;
std::cout << filename << ":" << std::endl
<< rays << " of " << num_rays << " ray fires done" << std::endl
<< xsct << " of " << num_xsct << " intersecting fires" << std::endl
<< gen << " unique rays used" << std::endl
<< (double)ttimer / CLOCKS_PER_SEC << " seconds" << std::endl;
exit( 1 );
}
| static void usage | ( | ) | [static] |
Definition at line 17 of file obb_time.cpp.
References NUM_RAYS, and NUM_XSCT.
{
std::cerr << "obb_time [-r <int>] [-i <int>] <filename>" << std::endl
<< " -r - Specify total rays to fire." << std::endl
<< " Zero implies unbounded. Default: " << NUM_RAYS << std::endl
<< " -i - Specify total intersecting rays to fire." << std::endl
<< " Zero implies unbounded. Default: " << NUM_XSCT << std::endl
<< " -s - Use set-based tree." << std::endl
<< " -p - Measure and report traversal performance statistics" << std::endl
<< " The input file should be generated using the '-s'" << std::endl
<< " option with 'obb_test'" << std::endl;
exit( 1 );
}
| bool do_sets = false |
Definition at line 64 of file obb_time.cpp.
Referenced by main().
| bool do_trv_stats = false |
Definition at line 65 of file obb_time.cpp.
Referenced by main().
| const char* filename = 0 |
Definition at line 63 of file obb_time.cpp.
| int gen = 0 |
Definition at line 68 of file obb_time.cpp.
Referenced by main(), and signal_handler().
| const int NUM_RAYS = 40000 |
Definition at line 12 of file obb_time.cpp.
Referenced by usage().
Definition at line 61 of file obb_time.cpp.
Referenced by main(), and signal_handler().
| const int NUM_XSCT = 20000 |
Definition at line 13 of file obb_time.cpp.
Referenced by usage().
Definition at line 62 of file obb_time.cpp.
Referenced by main(), and signal_handler().
| int rays = 0 |
Definition at line 68 of file obb_time.cpp.
Referenced by main(), and signal_handler().
| clock_t ttimer |
Definition at line 69 of file obb_time.cpp.
Referenced by main(), and signal_handler().
| int xsct = 0 |
Definition at line 68 of file obb_time.cpp.
Referenced by main(), and signal_handler().
 1.7.6.1
1.7.6.1