|
Mesh Oriented datABase
(version 5.4.1)
Array-based unstructured mesh datastructure
|
|
Mesh Oriented datABase
(version 5.4.1)
Array-based unstructured mesh datastructure
|
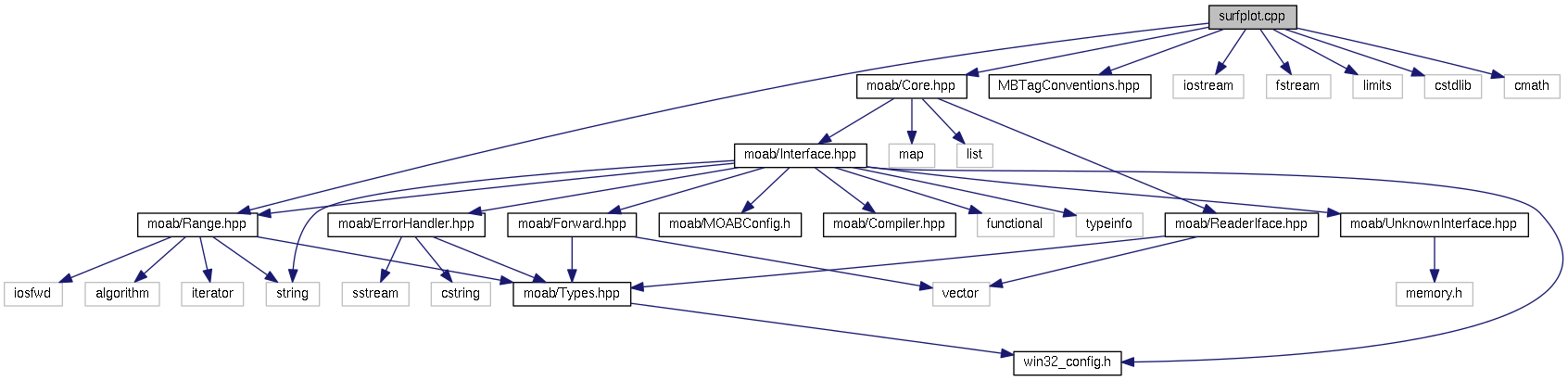
#include "moab/Core.hpp"#include "moab/Range.hpp"#include "MBTagConventions.hpp"#include <iostream>#include <fstream>#include <limits>#include <cstdlib>#include <cmath> Include dependency graph for surfplot.cpp:
Include dependency graph for surfplot.cpp:Go to the source code of this file.
Classes | |
| struct | CartVect3D |
Defines | |
| #define | USAGE_ERROR 1 |
| #define | READ_ERROR 2 |
| #define | WRITE_ERROR 3 |
| #define | SURFACE_NOT_FOUND 4 |
| #define | OTHER_ERROR 5 |
Enumerations | |
| enum | FileType { POSTSCRIPT, GNUPLOT, SVG } |
Functions | |
| static void | usage_error (const char *name) |
| static CartVect3D | operator- (const CartVect3D &a, const CartVect3D &b) |
| static double | operator% (const CartVect3D &a, const CartVect3D &b) |
| static CartVect3D | operator* (const CartVect3D &a, const CartVect3D &b) |
| static void | find_rotation (CartVect3D plane_normal, double matrix[3][3]) |
| static void | transform_point (CartVect3D &point, double matrix[3][3]) |
| static void | write_gnuplot (std::ostream &stream, const std::vector< CartVect3D > &list) |
| static void | write_svg (std::ostream &stream, const std::vector< CartVect3D > &list) |
| static void | write_eps (std::ostream &stream, const std::vector< CartVect3D > &list, int surface_id) |
| int | main (int argc, char *argv[]) |
| static void | box_max (CartVect3D &cur_max, const CartVect3D &pt) |
| static void | box_min (CartVect3D &cur_min, const CartVect3D &pt) |
| #define OTHER_ERROR 5 |
Definition at line 15 of file surfplot.cpp.
Referenced by main().
| #define READ_ERROR 2 |
Definition at line 12 of file surfplot.cpp.
Referenced by main().
| #define SURFACE_NOT_FOUND 4 |
Definition at line 14 of file surfplot.cpp.
Referenced by main().
| #define USAGE_ERROR 1 |
Definition at line 11 of file surfplot.cpp.
Referenced by usage_error().
| #define WRITE_ERROR 3 |
Definition at line 13 of file surfplot.cpp.
| enum FileType |
Definition at line 195 of file surfplot.cpp.
{
POSTSCRIPT,
GNUPLOT,
SVG
};
| static void box_max | ( | CartVect3D & | cur_max, |
| const CartVect3D & | pt | ||
| ) | [static] |
Definition at line 390 of file surfplot.cpp.
References CartVect3D::x, and CartVect3D::y.
Referenced by moab::AdaptiveKDTree::best_subdivision_plane(), moab::AdaptiveKDTree::best_subdivision_snap_plane(), moab::AdaptiveKDTree::best_vertex_median_plane(), moab::AdaptiveKDTree::best_vertex_sample_plane(), moab::Tree::create_root(), moab::AdaptiveKDTree::intersect_children_with_elems(), moab::AdaptiveKDTreeIter::intersect_ray(), main(), write_eps(), and write_svg().
| static void box_min | ( | CartVect3D & | cur_min, |
| const CartVect3D & | pt | ||
| ) | [static] |
Definition at line 398 of file surfplot.cpp.
References CartVect3D::x, and CartVect3D::y.
Referenced by moab::AdaptiveKDTree::best_subdivision_plane(), moab::AdaptiveKDTree::best_subdivision_snap_plane(), moab::AdaptiveKDTree::best_vertex_median_plane(), moab::AdaptiveKDTree::best_vertex_sample_plane(), moab::corners_from_box(), moab::Tree::create_root(), moab::AdaptiveKDTree::intersect_children_with_elems(), moab::AdaptiveKDTreeIter::intersect_ray(), main(), moab::ElemUtil::point_in_trilinear_hex(), write_eps(), and write_svg().
| static void find_rotation | ( | CartVect3D | plane_normal, |
| double | matrix[3][3] | ||
| ) | [static] |
Definition at line 128 of file surfplot.cpp.
References CartVect3D::len(), CartVect3D::x, CartVect3D::y, and CartVect3D::z.
Referenced by main().
{
// normalize
plane_normal /= plane_normal.len();
if( fabs( plane_normal.x ) < 0.1 ) plane_normal.x = 0.0;
if( fabs( plane_normal.y ) < 0.1 ) plane_normal.y = 0.0;
if( fabs( plane_normal.z ) < 0.1 ) plane_normal.z = 0.0;
// calculate vector to rotate about
const CartVect3D Z( 0, 0, 1 );
CartVect3D vector = plane_normal * Z;
const double len = vector.len();
// If vector is zero, no rotation
if( len < 1e-2 )
{
matrix[0][0] = matrix[1][1] = matrix[2][2] = 1.0;
matrix[0][1] = matrix[1][0] = 0.0;
matrix[0][2] = matrix[2][0] = 0.0;
matrix[1][2] = matrix[2][1] = 0.0;
return;
}
vector /= len;
const double cosine = plane_normal % Z;
const double sine = sqrt( 1 - cosine * cosine );
std::cerr << "Rotation: " << acos( cosine ) << " [" << vector.x << ' ' << vector.y << ' ' << vector.z << ']'
<< std::endl;
const double x = vector.x;
const double y = vector.y;
const double z = vector.z;
const double c = cosine;
const double s = sine;
const double o = 1.0 - cosine;
matrix[0][0] = c + x * x * o;
matrix[0][1] = -z * s + x * y * o;
matrix[0][2] = y * s + x * z * o;
matrix[1][0] = z * s + x * z * o;
matrix[1][1] = c + y * y * o;
matrix[1][2] = -x * s + y * z * o;
matrix[2][0] = -y * s + x * z * o;
matrix[2][1] = x * s + y * z * o;
matrix[2][2] = c + z * z * o;
}
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 204 of file surfplot.cpp.
References moab::Range::begin(), moab::Range::end(), ErrorCode, find_rotation(), GEOM_DIMENSION_TAG_NAME, moab::Interface::get_adjacencies(), moab::Interface::get_connectivity(), moab::Interface::get_coords(), moab::Interface::get_entities_by_dimension(), moab::Interface::get_entities_by_type_and_tag(), moab::Interface::globalId_tag(), GNUPLOT, CartVect3D::len(), moab::Interface::load_mesh(), MB_FILE_DOES_NOT_EXIST, MB_SUCCESS, MB_TYPE_INTEGER, MBENTITYSET, OTHER_ERROR, POSTSCRIPT, READ_ERROR, moab::Range::size(), SURFACE_NOT_FOUND, SVG, moab::Interface::tag_get_handle(), transform_point(), moab::Interface::UNION, usage_error(), write_eps(), write_gnuplot(), write_svg(), CartVect3D::x, CartVect3D::y, and CartVect3D::z.
{
Interface* moab = new Core();
ErrorCode result;
std::vector< CartVect3D >::iterator iter;
FileType type = GNUPLOT;
int idx = 1;
if( argc == 4 )
{
if( !strcmp( argv[idx], "-p" ) )
type = POSTSCRIPT;
else if( !strcmp( argv[idx], "-g" ) )
type = GNUPLOT;
else if( !strcmp( argv[idx], "-s" ) )
type = SVG;
else
usage_error( argv[0] );
++idx;
}
// scan CL args
int surface_id;
if( argc - idx != 2 ) usage_error( argv[0] );
char* endptr;
surface_id = strtol( argv[idx], &endptr, 0 );
if( !endptr || *endptr ) usage_error( argv[0] );
++idx;
// Load mesh
result = moab->load_mesh( argv[idx] );
if( MB_SUCCESS != result )
{
if( MB_FILE_DOES_NOT_EXIST == result )
std::cerr << argv[idx] << " : open failed.\n";
else
std::cerr << argv[idx] << " : error reading file.\n";
return READ_ERROR;
}
// Get tag handles
EntityHandle surface;
const int dimension = 2; // surface
if( surface_id )
{
Tag tags[2];
result = moab->tag_get_handle( GEOM_DIMENSION_TAG_NAME, 1, MB_TYPE_INTEGER, tags[0] );
if( MB_SUCCESS != result )
{
std::cerr << "No geometry tag.\n";
return OTHER_ERROR;
}
tags[1] = moab->globalId_tag();
// Find entityset for surface.
const void* tag_values[] = { &dimension, &surface_id };
Range surfaces;
moab->get_entities_by_type_and_tag( 0, MBENTITYSET, tags, tag_values, 2, surfaces );
if( surfaces.size() != 1 )
{
std::cerr << "Found " << surfaces.size() << " surfaces with ID " << surface_id << std::endl;
return SURFACE_NOT_FOUND;
}
surface = *surfaces.begin();
}
else
{
surface = 0;
}
// Get surface mesh
Range elements;
result = moab->get_entities_by_dimension( surface, dimension, elements );
if( MB_SUCCESS != result )
{
std::cerr << "Internal error\n";
return OTHER_ERROR;
}
// Calculate average corner normal in surface mesh
CartVect3D normal( 0, 0, 0 );
std::vector< EntityHandle > vertices;
std::vector< CartVect3D > coords;
for( Range::iterator i = elements.begin(); i != elements.end(); ++i )
{
vertices.clear();
result = moab->get_connectivity( &*i, 1, vertices, true );
if( MB_SUCCESS != result )
{
std::cerr << "Internal error\n";
return OTHER_ERROR;
}
coords.clear();
coords.resize( vertices.size() );
result = moab->get_coords( &vertices[0], vertices.size(), reinterpret_cast< double* >( &coords[0] ) );
if( MB_SUCCESS != result )
{
std::cerr << "Internal error\n";
return OTHER_ERROR;
}
for( size_t j = 0; j < coords.size(); ++j )
{
CartVect3D v1 = coords[( j + 1 ) % coords.size()] - coords[j];
CartVect3D v2 = coords[( j + 1 ) % coords.size()] - coords[( j + 2 ) % coords.size()];
normal += ( v1 * v2 );
}
}
normal /= normal.len();
// Get edges from elements
Range edge_range;
result = moab->get_adjacencies( elements, 1, true, edge_range, Interface::UNION );
if( MB_SUCCESS != result )
{
std::cerr << "Internal error\n";
return OTHER_ERROR;
}
// Get vertex coordinates for each edge
std::vector< EntityHandle > edges( edge_range.size() );
std::copy( edge_range.begin(), edge_range.end(), edges.begin() );
vertices.clear();
result = moab->get_connectivity( &edges[0], edges.size(), vertices, true );
if( MB_SUCCESS != result )
{
std::cerr << "Internal error\n";
return OTHER_ERROR;
}
coords.clear();
coords.resize( vertices.size() );
result = moab->get_coords( &vertices[0], vertices.size(), reinterpret_cast< double* >( &coords[0] ) );
if( MB_SUCCESS != result )
{
std::cerr << "Internal error\n";
return OTHER_ERROR;
}
// Rotate points such that the projection into the view plane
// can be accomplished by discarding the 'z' coordinate of each
// point.
std::cerr << "Plane normal: [" << normal.x << ' ' << normal.y << ' ' << normal.z << ']' << std::endl;
double transform[3][3];
find_rotation( normal, transform );
for( iter = coords.begin(); iter != coords.end(); ++iter )
transform_point( *iter, transform );
// Write the file.
switch( type )
{
case POSTSCRIPT:
write_eps( std::cout, coords, surface_id );
break;
case SVG:
write_svg( std::cout, coords );
break;
default:
write_gnuplot( std::cout, coords );
break;
}
return 0;
}
| static double operator% | ( | const CartVect3D & | a, |
| const CartVect3D & | b | ||
| ) | [static] |
Definition at line 108 of file surfplot.cpp.
References CartVect3D::x, CartVect3D::y, and CartVect3D::z.
| static CartVect3D operator* | ( | const CartVect3D & | a, |
| const CartVect3D & | b | ||
| ) | [static] |
Definition at line 113 of file surfplot.cpp.
References CartVect3D::x, CartVect3D::y, and CartVect3D::z.
| static CartVect3D operator- | ( | const CartVect3D & | a, |
| const CartVect3D & | b | ||
| ) | [static] |
Definition at line 103 of file surfplot.cpp.
References CartVect3D::x, CartVect3D::y, and CartVect3D::z.
| static void transform_point | ( | CartVect3D & | point, |
| double | matrix[3][3] | ||
| ) | [static] |
Definition at line 178 of file surfplot.cpp.
References CartVect3D::x, CartVect3D::y, and CartVect3D::z.
Referenced by main().
| static void usage_error | ( | const char * | name | ) | [static] |
Definition at line 17 of file surfplot.cpp.
References USAGE_ERROR.
Referenced by main().
{
std::cerr << "Usage: " << name << " [-g|-p] <Surface_ID> <input_file>" << std::endl
<< "\t-g - Write GNU Plot data file (default)." << std::endl
<< "\t-p - Write encapsulated postscript file" << std::endl
<< "\t-s - Write an SVG file" << std::endl
<< "\t<Surface_ID> - ID of surface containing mesh to export (0 for entire file)." << std::endl
<< "\t<input_file> - Mesh file to read." << std::endl
<< std::endl
<< " This utility plots the mesh of a single geometric surface "
<< "projected to a plane. The output file is written to stdout." << std::endl;
exit( USAGE_ERROR );
}
| void write_eps | ( | std::ostream & | stream, |
| const std::vector< CartVect3D > & | list, | ||
| int | surface_id | ||
| ) | [static] |
Definition at line 406 of file surfplot.cpp.
References box_max(), box_min(), CartVect3D::x, and CartVect3D::y.
Referenced by main().
{
// Coordinate range to use within EPS file
const int X_MAX = 540; // 540 pts / 72 pts/inch = 7.5 inches
const int Y_MAX = 720; // 720 pts / 72 pts/inch = 10 inches
std::vector< CartVect3D >::const_iterator iter;
// Get bounding box
const double D_MAX = std::numeric_limits< double >::max();
CartVect3D min( D_MAX, D_MAX, 0 );
CartVect3D max( -D_MAX, -D_MAX, 0 );
for( iter = coords.begin(); iter != coords.end(); ++iter )
{
box_max( max, *iter );
box_min( min, *iter );
}
// Calculate translation to page coordinates
CartVect3D offset = CartVect3D( 0, 0, 0 ) - min;
CartVect3D scale = max - min;
scale.x = X_MAX / scale.x;
scale.y = Y_MAX / scale.y;
if( scale.x > scale.y ) // keep proportions
scale.x = scale.y;
else
scale.y = scale.x;
// std::cerr << "Min: " << min.x << ' ' << min.y <<
// " Max: " << max.x << ' ' << max.y << std::endl
// << "Offset: " << offset.x << ' ' << offset.y <<
// " Scale: " << scale.x << ' ' << scale.y << std::endl;
// Write header stuff
s << "%!PS-Adobe-2.0 EPSF-2.0" << std::endl;
s << "%%Creator: MOAB surfplot" << std::endl;
s << "%%Title: Surface " << id << std::endl;
s << "%%DocumentData: Clean7Bit" << std::endl;
s << "%%Origin: 0 0" << std::endl;
int max_x = (int)( ( max.x + offset.x ) * scale.x );
int max_y = (int)( ( max.y + offset.y ) * scale.y );
s << "%%BoundingBox: 0 0 " << max_x << ' ' << max_y << std::endl;
s << "%%Pages: 1" << std::endl;
s << "%%BeginProlog" << std::endl;
s << "save" << std::endl;
s << "countdictstack" << std::endl;
s << "mark" << std::endl;
s << "newpath" << std::endl;
s << "/showpage {} def" << std::endl;
s << "/setpagedevice {pop} def" << std::endl;
s << "%%EndProlog" << std::endl;
s << "%%Page: 1 1" << std::endl;
s << "1 setlinewidth" << std::endl;
s << "0.0 setgray" << std::endl;
for( iter = coords.begin(); iter != coords.end(); ++iter )
{
double x1 = ( iter->x + offset.x ) * scale.x;
double y1 = ( iter->y + offset.y ) * scale.y;
if( ++iter == coords.end() ) break;
double x2 = ( iter->x + offset.x ) * scale.x;
double y2 = ( iter->y + offset.y ) * scale.y;
s << "newpath" << std::endl;
s << x1 << ' ' << y1 << " moveto" << std::endl;
s << x2 << ' ' << y2 << " lineto" << std::endl;
s << "stroke" << std::endl;
}
s << "%%Trailer" << std::endl;
s << "cleartomark" << std::endl;
s << "countdictstack" << std::endl;
s << "exch sub { end } repeat" << std::endl;
s << "restore" << std::endl;
s << "%%EOF" << std::endl;
}
| void write_gnuplot | ( | std::ostream & | stream, |
| const std::vector< CartVect3D > & | list | ||
| ) | [static] |
Definition at line 370 of file surfplot.cpp.
Referenced by main().
{
std::vector< CartVect3D >::const_iterator iter;
stream << std::endl;
for( iter = coords.begin(); iter != coords.end(); ++iter )
{
stream << iter->x << ' ' << iter->y << std::endl;
++iter;
if( iter == coords.end() )
{
stream << std::endl;
break;
}
stream << iter->x << ' ' << iter->y << std::endl;
stream << std::endl;
}
std::cerr << "Display with gnuplot command \"plot with lines\"\n";
}
| void write_svg | ( | std::ostream & | stream, |
| const std::vector< CartVect3D > & | list | ||
| ) | [static] |
Definition at line 485 of file surfplot.cpp.
References box_max(), box_min(), size, CartVect3D::x, and CartVect3D::y.
Referenced by main().
{
std::vector< CartVect3D >::const_iterator iter;
// Get bounding box
const double D_MAX = std::numeric_limits< double >::max();
CartVect3D min( D_MAX, D_MAX, 0 );
CartVect3D max( -D_MAX, -D_MAX, 0 );
for( iter = coords.begin(); iter != coords.end(); ++iter )
{
box_max( max, *iter );
box_min( min, *iter );
}
CartVect3D size = max - min;
// scale to 640 pixels on a side
double scale = 640.0 / ( size.x > size.y ? size.x : size.y );
size *= scale;
file << "<?xml version=\"1.0\" standalone=\"no\"?>" << std::endl;
file << "<!DOCTYPE svg PUBLIC \"-//W3C//DTD SVG 1.1//EN\" "
<< "\"http://www.w3.org/Graphics/SVG/1.1/DTD/svg11.dtd\">" << std::endl;
file << std::endl;
file << "<svg width=\"" << (int)size.x << "\" height=\"" << (int)size.y
<< "\" version=\"1.1\" xmlns=\"http://www.w3.org/2000/svg\">" << std::endl;
int left = (int)( min.x * scale );
int top = (int)( min.y * scale );
iter = coords.begin();
while( iter != coords.end() )
{
file << "<line "
<< "x1=\"" << (int)( scale * iter->x ) - left << "\" "
<< "y1=\"" << (int)( scale * iter->y ) - top << "\" ";
++iter;
file << "x2=\"" << (int)( scale * iter->x ) - left << "\" "
<< "y2=\"" << (int)( scale * iter->y ) - top << "\" "
<< " style=\"stroke:rgb(99,99,99);stroke-width:2\""
<< "/>" << std::endl;
++iter;
}
// Write footer
file << "</svg>" << std::endl;
}
 1.7.6.1.
Dark theme by Tilen Majerle. All rights reserved.
1.7.6.1.
Dark theme by Tilen Majerle. All rights reserved.