|
Mesh Oriented datABase
(version 5.4.1)
Array-based unstructured mesh datastructure
|
|
Mesh Oriented datABase
(version 5.4.1)
Array-based unstructured mesh datastructure
|
Convex polyhedron. More...
#include <BSPTreePoly.hpp>
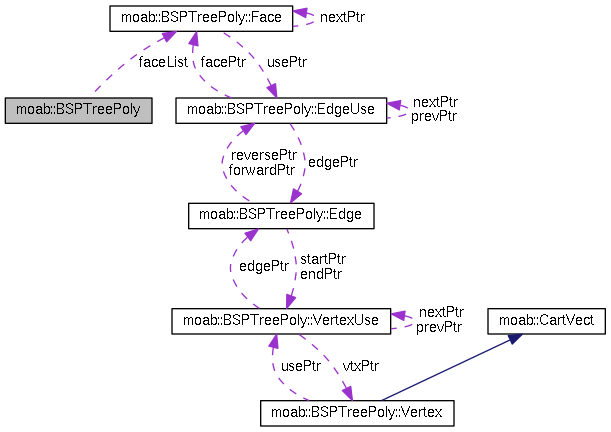
 Collaboration diagram for moab::BSPTreePoly:
Collaboration diagram for moab::BSPTreePoly:Classes | |
| struct | Edge |
| struct | EdgeUse |
| struct | Face |
| struct | Vertex |
| struct | VertexUse |
Public Member Functions | |
| BSPTreePoly (const CartVect hex_corners[8]) | |
| Initialize as a planar-faced hexahedron. | |
| BSPTreePoly () | |
| ~BSPTreePoly () | |
| ErrorCode | set (const CartVect hex_corners[8]) |
| Initialize as a planar-faced hexahedron. | |
| void | clear () |
| void | get_faces (std::vector< const Face * > &face_list) const |
| Get handles for faces. | |
| void | get_vertices (const Face *face, std::vector< CartVect > &vertices) const |
| Get corner coordinates for a face. | |
| bool | cut_polyhedron (const CartVect &plane_normal, double plane_coeff) |
| bool | is_point_contained (const CartVect &point) const |
| double | volume () const |
| Assumes planar faces. | |
| bool | is_valid () const |
Static Public Member Functions | |
| static void | reset_debug_ids () |
Private Member Functions | |
| void | set_vertex_marks (int value) |
| BSPTreePoly (const BSPTreePoly ©) | |
| BSPTreePoly & | operator= (const BSPTreePoly ©) |
Private Attributes | |
| Face * | faceList |
Convex polyhedron.
This class is used to represent the convex polyhedron that bounds a node in a general plane-based BSP-tree.
Definition at line 17 of file BSPTreePoly.hpp.
| moab::BSPTreePoly::BSPTreePoly | ( | const BSPTreePoly & | copy | ) | [private] |
| moab::BSPTreePoly::BSPTreePoly | ( | const CartVect | hex_corners[8] | ) | [inline] |
Initialize as a planar-faced hexahedron.
| hex_corners | Corner coordinates for a hexahedron, in Exodus/Patran order |
Definition at line 38 of file BSPTreePoly.hpp.
References hex_corners.
: faceList( 0 ) { set( hex_corners ); }
| moab::BSPTreePoly::BSPTreePoly | ( | ) | [inline] |
Definition at line 42 of file BSPTreePoly.hpp.
: faceList( 0 ) {}
| moab::BSPTreePoly::~BSPTreePoly | ( | ) | [inline] |
| void moab::BSPTreePoly::clear | ( | ) |
Definition at line 388 of file BSPTreePoly.cpp.
References faceList, and moab::BSPTreePoly::Face::nextPtr.
Referenced by set(), and ~BSPTreePoly().
| bool moab::BSPTreePoly::cut_polyhedron | ( | const CartVect & | plane_normal, |
| double | plane_coeff | ||
| ) |
Intersect a plane with a polyhedron, retaining the portion of the polyhedron below the plane. This will fail if polyhedron is not convex.
Definition at line 599 of file BSPTreePoly.cpp.
References moab::BSPTreePoly::VertexUse::edgePtr, moab::BSPTreePoly::EdgeUse::edgePtr, moab::BSPTreePoly::EdgeUse::end(), moab::BSPTreePoly::Edge::end(), EPSILON, faceList, moab::BSPTreePoly::Edge::forwardPtr, moab::BSPTreePoly::EdgeUse::insert_after(), moab::BSPTreePoly::Vertex::markVal, moab::BSPTreePoly::VertexUse::nextPtr, moab::BSPTreePoly::EdgeUse::nextPtr, moab::BSPTreePoly::Face::nextPtr, moab::BSPTreePoly::Edge::other(), moab::BSPTreePoly::Edge::reversePtr, set_vertex_marks(), moab::split_edge(), moab::split_face(), moab::BSPTreePoly::EdgeUse::start(), moab::BSPTreePoly::Edge::start(), t, and moab::BSPTreePoly::Edge::use().
Referenced by moab::BSPTreeIter::calculate_polyhedron().
{
const double EPSILON = 1e-6; // points this close are considered coincident
// scale epsilon rather than normalizing normal vector
const double epsilon = EPSILON * ( plane_normal % plane_normal );
// Classify all points above/below plane and destroy any faces
// that have no vertices below the plane.
const int UNKNOWN = 0;
const int ABOVE = 1;
const int ON = 2;
const int BELOW = 3;
int num_above = 0;
set_vertex_marks( UNKNOWN );
// Classify all points above/below plane and
// split any edge that intersect the plane.
for( Face* face = faceList; face; face = face->nextPtr )
{
EdgeUse* edge = face->usePtr;
do
{
Vertex* start = edge->edgePtr->start();
Vertex* end = edge->edgePtr->end();
if( !start->markVal )
{
double d = plane_normal % *start + plane_coeff;
if( d * d <= epsilon )
start->markVal = ON;
else if( d < 0.0 )
start->markVal = BELOW;
else
{
start->markVal = ABOVE;
++num_above;
}
}
if( !end->markVal )
{
double d = plane_normal % *end + plane_coeff;
if( d * d <= epsilon )
end->markVal = ON;
else if( d < 0.0 )
end->markVal = BELOW;
else
{
end->markVal = ABOVE;
++num_above;
}
}
if( ( end->markVal == ABOVE && start->markVal == BELOW ) ||
( end->markVal == BELOW && start->markVal == ABOVE ) )
{
CartVect dir = *end - *start;
double t = -( plane_normal % *start + plane_coeff ) / ( dir % plane_normal );
Vertex* new_vtx = new Vertex( *start + t * dir );
new_vtx->markVal = ON;
split_edge( new_vtx, edge->edgePtr ); // This call might delete new_vtx
end = new_vtx;
}
edge = edge->nextPtr;
} while( edge && edge != face->usePtr );
}
if( !num_above ) return false;
// Split faces
for( Face* face = faceList; face; face = face->nextPtr )
{
EdgeUse* edge = face->usePtr;
EdgeUse *split_start = 0, *split_end = 0, *other_split = 0;
do
{
if( edge->end()->markVal == ON && edge->start()->markVal != ON )
{
if( !split_start )
split_start = edge->nextPtr;
else if( !split_end )
split_end = edge;
else
other_split = edge;
}
edge = edge->nextPtr;
} while( edge && edge != face->usePtr );
// If two vertices are on plane (but not every vertex)
// then split the face
if( split_end && !other_split )
{
assert( split_start );
Face* new_face = split_face( split_start, split_end );
new_face->nextPtr = faceList;
faceList = new_face;
}
}
// Destroy all faces that are above the plane
Face** lptr = &faceList;
while( *lptr )
{
EdgeUse* edge = ( *lptr )->usePtr;
bool some_above = false;
do
{
if( edge->start()->markVal == ABOVE )
{
some_above = true;
break;
}
edge = edge->nextPtr;
} while( edge && edge != ( *lptr )->usePtr );
if( some_above )
{
Face* dead = *lptr;
*lptr = ( *lptr )->nextPtr;
delete dead;
}
else
{
lptr = &( ( *lptr )->nextPtr );
}
}
// Construct a new face in the cut plane
// First find an edge to start at
Edge* edge_ptr = 0;
for( Face* face = faceList; face && !edge_ptr; face = face->nextPtr )
{
EdgeUse* co_edge = face->usePtr;
do
{
if( 0 == co_edge->edgePtr->other( co_edge ) )
{
edge_ptr = co_edge->edgePtr;
break;
}
co_edge = co_edge->nextPtr;
} while( co_edge && co_edge != face->usePtr );
}
if( !edge_ptr ) return false;
// Constuct new face and first CoEdge
faceList = new Face( faceList );
Vertex *next_vtx, *start_vtx;
EdgeUse* prev_coedge;
if( edge_ptr->forwardPtr )
{
next_vtx = edge_ptr->start();
start_vtx = edge_ptr->end();
assert( !edge_ptr->reversePtr );
prev_coedge = edge_ptr->reversePtr = new EdgeUse( edge_ptr, faceList );
}
else
{
next_vtx = edge_ptr->end();
start_vtx = edge_ptr->start();
prev_coedge = edge_ptr->forwardPtr = new EdgeUse( edge_ptr, faceList );
}
// Construct coedges until loop is closed
while( next_vtx != start_vtx )
{
// find next edge adjacent to vertex with only one adjacent face
VertexUse* this_use = edge_ptr->use( next_vtx );
VertexUse* use = this_use->nextPtr;
while( use != this_use )
{
if( use->edgePtr->forwardPtr == 0 )
{
edge_ptr = use->edgePtr;
assert( edge_ptr->start() == next_vtx );
next_vtx = edge_ptr->end();
edge_ptr->forwardPtr = new EdgeUse( edge_ptr );
edge_ptr->forwardPtr->insert_after( prev_coedge );
prev_coedge = edge_ptr->forwardPtr;
break;
}
else if( use->edgePtr->reversePtr == 0 )
{
edge_ptr = use->edgePtr;
assert( edge_ptr->end() == next_vtx );
next_vtx = edge_ptr->start();
edge_ptr->reversePtr = new EdgeUse( edge_ptr );
edge_ptr->reversePtr->insert_after( prev_coedge );
prev_coedge = edge_ptr->reversePtr;
break;
}
use = use->nextPtr;
assert( use != this_use ); // failed to close loop!
}
}
return true;
}
| void moab::BSPTreePoly::get_faces | ( | std::vector< const Face * > & | face_list | ) | const |
| void moab::BSPTreePoly::get_vertices | ( | const Face * | face, |
| std::vector< CartVect > & | vertices | ||
| ) | const |
Get corner coordinates for a face.
Definition at line 473 of file BSPTreePoly.cpp.
References moab::BSPTreePoly::EdgeUse::end(), moab::BSPTreePoly::EdgeUse::nextPtr, and moab::BSPTreePoly::Face::usePtr.
| bool moab::BSPTreePoly::is_point_contained | ( | const CartVect & | point | ) | const |
Test if a point is contained in the polyhedron.
algorithm assumes *convex* polyhedron.
Definition at line 877 of file BSPTreePoly.cpp.
References EPSILON, and faceList.
{
if( !faceList ) // empty (zero-dimension) polyhedron
return false;
const double EPSILON = 1e-6;
// Test that point is below the plane of each face
// NOTE: This will NOT work for polyhedra w/ concavities
for( Face* face = faceList; face; face = face->nextPtr )
{
Vertex *pt1, *pt2, *pt3;
pt1 = face->usePtr->start();
pt2 = face->usePtr->end();
pt3 = face->usePtr->nextPtr->end();
if( pt3 == pt1 ) // degenerate
continue;
CartVect norm = ( *pt3 - *pt2 ) * ( *pt1 - *pt2 );
double coeff = -( norm % *pt2 );
if( ( norm % point + coeff ) > EPSILON ) // if above plane, with some -epsilon
return false;
}
return true;
}
| bool moab::BSPTreePoly::is_valid | ( | ) | const |
Definition at line 805 of file BSPTreePoly.cpp.
References moab::BSPTreePoly::VertexUse::edgePtr, moab::BSPTreePoly::EdgeUse::edgePtr, moab::BSPTreePoly::EdgeUse::end(), moab::BSPTreePoly::Edge::end(), moab::BSPTreePoly::Edge::endPtr, faceList, moab::BSPTreePoly::EdgeUse::facePtr, moab::BSPTreePoly::Edge::forwardPtr, moab::BSPTreePoly::VertexUse::nextPtr, moab::BSPTreePoly::EdgeUse::nextPtr, moab::BSPTreePoly::Face::nextPtr, moab::BSPTreePoly::VertexUse::prevPtr, moab::BSPTreePoly::EdgeUse::prevPtr, moab::BSPTreePoly::Edge::reversePtr, moab::BSPTreePoly::EdgeUse::start(), moab::BSPTreePoly::Edge::start(), moab::BSPTreePoly::Edge::startPtr, moab::BSPTreePoly::Vertex::usePtr, and moab::BSPTreePoly::VertexUse::vtxPtr.
{
std::set< Face* > list_faces;
int i = 0;
for( Face* ptr = faceList; ptr; ptr = ptr->nextPtr )
{
if( ++i > 10000 ) return false;
if( !list_faces.insert( ptr ).second ) return false;
}
std::set< Vertex* > vertices;
for( Face* face = faceList; face; face = face->nextPtr )
{
i = 0;
EdgeUse* coedge = face->usePtr;
do
{
if( ++i > 10000 ) return false;
if( coedge->facePtr != face ) return false;
Edge* edge = coedge->edgePtr;
if( !edge->startPtr || !edge->endPtr ) return false;
vertices.insert( edge->start() );
vertices.insert( edge->end() );
EdgeUse* other;
if( edge->forwardPtr == coedge )
other = edge->reversePtr;
else if( edge->reversePtr != coedge )
return false;
else
other = edge->forwardPtr;
if( !other ) return false;
if( list_faces.find( other->facePtr ) == list_faces.end() ) return false;
EdgeUse* next = coedge->nextPtr;
if( next->prevPtr != coedge ) return false;
if( coedge->end() != next->start() ) return false;
coedge = next;
} while( coedge != face->usePtr );
}
for( std::set< Vertex* >::iterator j = vertices.begin(); j != vertices.end(); ++j )
{
Vertex* vtx = *j;
i = 0;
VertexUse* use = vtx->usePtr;
do
{
if( ++i > 10000 ) return false;
if( use->vtxPtr != vtx ) return false;
Edge* edge = use->edgePtr;
if( !edge ) return false;
if( edge->startPtr != use && edge->endPtr != use ) return false;
VertexUse* next = use->nextPtr;
if( next->prevPtr != use ) return false;
use = next;
} while( use != vtx->usePtr );
}
return true;
}
| BSPTreePoly& moab::BSPTreePoly::operator= | ( | const BSPTreePoly & | copy | ) | [private] |
| void moab::BSPTreePoly::reset_debug_ids | ( | ) | [static] |
For debugging, does nothing unless debug feature is enabled
Definition at line 189 of file BSPTreePoly.cpp.
{
#ifdef DEBUG_IDS
BSPTreePoly::Vertex::nextID = 1;
BSPTreePoly::Edge::nextID = 1;
BSPTreePoly::Face::nextID = 1;
#endif
}
| ErrorCode moab::BSPTreePoly::set | ( | const CartVect | hex_corners[8] | ) |
Initialize as a planar-faced hexahedron.
| hex_corners | Corner coordinates for a hexahedron, in Exodus/Patran order |
Definition at line 398 of file BSPTreePoly.cpp.
References clear(), faceList, moab::BSPTreePoly::Edge::forwardPtr, moab::BSPTreePoly::EdgeUse::insert_after(), MB_SUCCESS, and moab::BSPTreePoly::Edge::reversePtr.
Referenced by moab::BSPTreeIter::calculate_polyhedron(), and moab::BSPTreeBoxIter::calculate_polyhedron().
{
clear();
Vertex* vertices[8];
for( int i = 0; i < 8; ++i )
vertices[i] = new Vertex( hex_corners[i] );
Edge* edges[12];
#ifdef DEBUG_IDS
int start_id = Edge::nextID;
#endif
for( int i = 0; i < 4; ++i )
{
int j = ( i + 1 ) % 4;
edges[i] = new Edge( vertices[i], vertices[j] );
edges[i + 4] = new Edge( vertices[i], vertices[i + 4] );
edges[i + 8] = new Edge( vertices[i + 4], vertices[j + 4] );
}
#ifdef DEBUG_IDS
for( int i = 0; i < 12; ++i )
edges[i]->id = start_id++;
#endif
static const int face_conn[6][4] = { { 0, 5, -8, -4 }, { 1, 6, -9, -5 }, { 2, 7, -10, -6 },
{ 3, 4, -11, -7 }, { -3, -2, -1, -12 }, { 8, 9, 10, 11 } };
for( int i = 0; i < 6; ++i )
{
faceList = new Face( faceList );
EdgeUse* prev = 0;
for( int j = 0; j < 4; ++j )
{
int e = face_conn[i][j];
if( e < 0 )
{
e = ( -e ) % 12;
assert( !edges[e]->reversePtr );
if( !prev )
{
edges[e]->reversePtr = new EdgeUse( edges[e], faceList );
}
else
{
edges[e]->reversePtr = new EdgeUse( edges[e] );
edges[e]->reversePtr->insert_after( prev );
}
prev = edges[e]->reversePtr;
}
else
{
assert( !edges[e]->forwardPtr );
if( !prev )
{
edges[e]->forwardPtr = new EdgeUse( edges[e], faceList );
}
else
{
edges[e]->forwardPtr = new EdgeUse( edges[e] );
edges[e]->forwardPtr->insert_after( prev );
}
prev = edges[e]->forwardPtr;
}
}
}
return MB_SUCCESS;
}
| void moab::BSPTreePoly::set_vertex_marks | ( | int | value | ) | [private] |
Definition at line 508 of file BSPTreePoly.cpp.
References moab::BSPTreePoly::EdgeUse::edgePtr, moab::BSPTreePoly::Edge::end(), faceList, moab::BSPTreePoly::Vertex::markVal, moab::BSPTreePoly::EdgeUse::nextPtr, and moab::BSPTreePoly::Edge::start().
Referenced by cut_polyhedron().
| double moab::BSPTreePoly::volume | ( | ) | const |
Assumes planar faces.
Definition at line 500 of file BSPTreePoly.cpp.
References faceList, and moab::BSPTreePoly::Face::nextPtr.
Referenced by moab::BSPTreeIter::volume().
Face* moab::BSPTreePoly::faceList [private] |
Definition at line 24 of file BSPTreePoly.hpp.
Referenced by clear(), cut_polyhedron(), get_faces(), is_point_contained(), is_valid(), set(), set_vertex_marks(), and volume().
 1.7.6.1.
Dark theme by Tilen Majerle. All rights reserved.
1.7.6.1.
Dark theme by Tilen Majerle. All rights reserved.