|
Mesh Oriented datABase
(version 5.4.1)
Array-based unstructured mesh datastructure
|
|
Mesh Oriented datABase
(version 5.4.1)
Array-based unstructured mesh datastructure
|
#include <SmoothCurve.hpp>
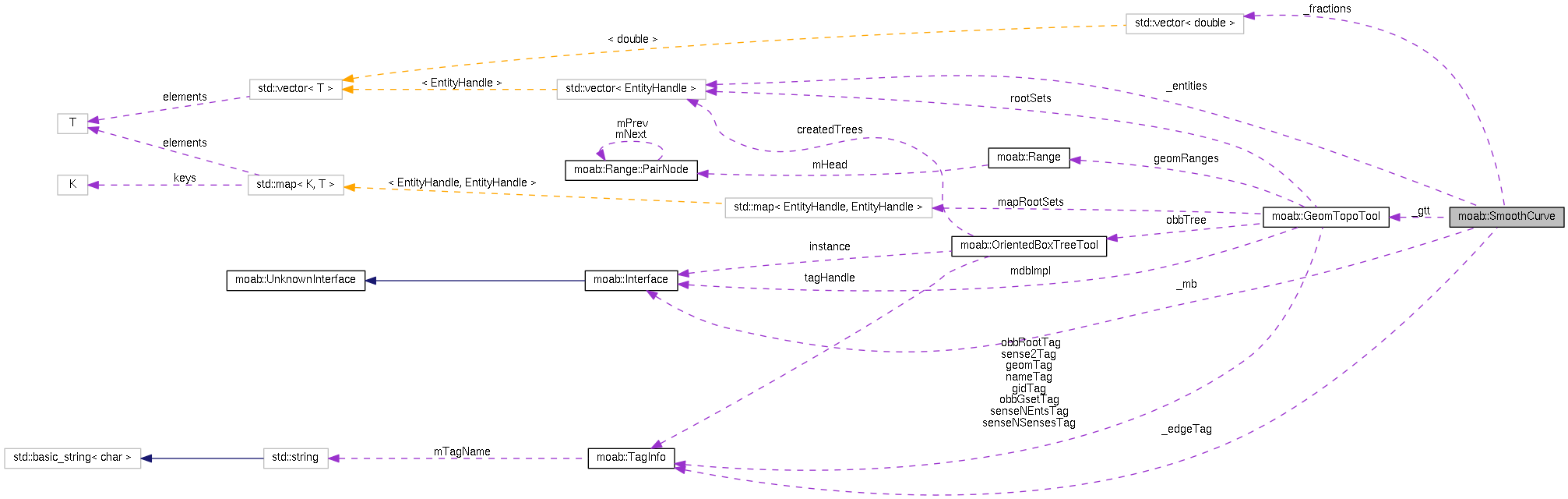
 Collaboration diagram for moab::SmoothCurve:
Collaboration diagram for moab::SmoothCurve:Public Member Functions | |
| SmoothCurve (Interface *mb, EntityHandle curve, GeomTopoTool *gTool) | |
| virtual | ~SmoothCurve () |
| virtual double | arc_length () |
| virtual bool | is_parametric () |
| Get the parametric status of the curve. | |
| virtual bool | is_periodic (double &period) |
| Get the periodic status of the curve. | |
| virtual void | get_param_range (double &u_start, double &u_end) |
| Get the parameter range of the curve. | |
| virtual double | u_from_arc_length (double u_root, double arc_length) |
| Compute the parameter value at a specified distance along the curve. | |
| virtual bool | position_from_u (double u, double &x, double &y, double &z, double *tg=NULL) |
| Evaluate the curve at a specified parameter value. | |
| virtual void | move_to_curve (double &x, double &y, double &z) |
| Move a point near the curve to the closest point on the curve. | |
| virtual double | u_from_position (double x, double y, double z, EntityHandle &v, int &indexEdge) |
| Get the u parameter value on the curve closest to x,y,z and the point on the curve. | |
| virtual void | start_coordinates (double &x, double &y, double &z) |
| Get the starting point of the curve. | |
| virtual void | end_coordinates (double &x, double &y, double &z) |
| Get the ending point of the curve. | |
| void | compute_tangents_for_each_edge () |
| void | compute_control_points_on_boundary_edges (double min_dot, std::map< EntityHandle, SmoothFace * > &mapSurfaces, Tag controlPointsTag, Tag markTag) |
| ErrorCode | evaluate_smooth_edge (EntityHandle eh, double &tt, CartVect &outv, CartVect &out_tangent) |
Private Attributes | |
| std::vector< EntityHandle > | _entities |
| double | _leng |
| std::vector< double > | _fractions |
| Tag | _edgeTag |
| Interface * | _mb |
| EntityHandle | _set |
| GeomTopoTool * | _gtt |
Definition at line 29 of file SmoothCurve.hpp.
| moab::SmoothCurve::SmoothCurve | ( | Interface * | mb, |
| EntityHandle | curve, | ||
| GeomTopoTool * | gTool | ||
| ) |
Definition at line 16 of file SmoothCurve.cpp.
| moab::SmoothCurve::~SmoothCurve | ( | ) | [virtual] |
Definition at line 25 of file SmoothCurve.cpp.
{
// TODO Auto-generated destructor stub
}
| double moab::SmoothCurve::arc_length | ( | ) | [virtual] |
| void moab::SmoothCurve::compute_control_points_on_boundary_edges | ( | double | min_dot, |
| std::map< EntityHandle, SmoothFace * > & | mapSurfaces, | ||
| Tag | controlPointsTag, | ||
| Tag | markTag | ||
| ) |
Definition at line 428 of file SmoothCurve.cpp.
References _edgeTag, _entities, _fractions, _gtt, _leng, _mb, _set, ErrorCode, moab::Interface::get_connectivity(), moab::Interface::get_coords(), moab::Interface::get_entities_by_type(), moab::GeomTopoTool::get_senses(), moab::CartVect::length(), MB_SUCCESS, MB_TYPE_DOUBLE, MBEDGE, T, moab::Interface::tag_get_data(), moab::Interface::tag_get_handle(), and moab::Interface::tag_set_data().
Referenced by moab::FBEngine::initializeSmoothing().
{
// these points really need the surfaces they belong to, because the control points on edges
// depend on the normals on surfaces
// the control points are averaged from different surfaces, by simple mean average
// the surfaces have
// do we really need min_dot here?
// first of all, find out the SmoothFace for each surface set that is adjacent here
// GeomTopoTool gTopoTool(_mb);
std::vector< EntityHandle > faces;
std::vector< int > senses;
ErrorCode rval = _gtt->get_senses( _set, faces, senses );
if( MB_SUCCESS != rval ) return;
// need to find the smooth face attached
unsigned int numSurfacesAdjacent = faces.size();
// get the edges, and then get the
// std::vector<EntityHandle> entities;
_mb->get_entities_by_type( _set, MBEDGE, _entities ); // no recursion!!
// each edge has the tangent computed already
Tag tangentsTag;
rval = _mb->tag_get_handle( "TANGENTS", 6, MB_TYPE_DOUBLE, tangentsTag );
if( rval != MB_SUCCESS ) return; // some error should be thrown
// we do not want to search every time
std::vector< SmoothFace* > smoothFaceArray;
unsigned int i = 0;
for( i = 0; i < numSurfacesAdjacent; i++ )
{
SmoothFace* sms = mapSurfaces[faces[i]];
smoothFaceArray.push_back( sms );
}
unsigned int e = 0;
for( e = 0; e < _entities.size(); e++ )
{
CartVect zero( 0. );
CartVect ctrlP[3] = { zero, zero, zero }; // null positions initially
// the control points are averaged from connected faces
EntityHandle edge = _entities[e]; // the edge in the chain
int nnodes;
const EntityHandle* conn2;
rval = _mb->get_connectivity( edge, conn2, nnodes );
if( rval != MB_SUCCESS || 2 != nnodes ) return; // or continue or return error
// double coords[6]; // store the coordinates for the nodes
CartVect P[2];
// ErrorCode rval = _mb->get_coords(conn2, 2, coords);
rval = _mb->get_coords( conn2, 2, (double*)&P[0] );
if( rval != MB_SUCCESS ) return;
CartVect chord = P[1] - P[0];
_leng += chord.length();
_fractions.push_back( _leng );
CartVect N[2];
// MBCartVect N0(&normalVec[0]);
// MBCartVect N3(&normalVec[3]);
CartVect T[2]; // T0, T3
// if (edge->num_adj_facets() <= 1) {
// stat = compute_curve_tangent(edge, min_dot, T0, T3);
// if (stat != CUBIT_SUCCESS)
// return stat;
//} else {
//}
rval = _mb->tag_get_data( tangentsTag, &edge, 1, &T[0] );
if( rval != MB_SUCCESS ) return;
for( i = 0; i < numSurfacesAdjacent; i++ )
{
CartVect controlForEdge[3];
rval = smoothFaceArray[i]->get_normals_for_vertices( conn2, N );
if( rval != MB_SUCCESS ) return;
rval = smoothFaceArray[i]->init_edge_control_points( P[0], P[1], N[0], N[1], T[0], T[1], controlForEdge );
if( rval != MB_SUCCESS ) return;
// accumulate those over faces!!!
for( int j = 0; j < 3; j++ )
{
ctrlP[j] += controlForEdge[j];
}
}
// now divide them for the average position!
for( int j = 0; j < 3; j++ )
{
ctrlP[j] /= numSurfacesAdjacent;
}
// we are done, set the control points now!
// edge->control_points(ctrl_pts, 4);
rval = _mb->tag_set_data( controlPointsTag, &edge, 1, &ctrlP[0] );
if( rval != MB_SUCCESS ) return;
this->_edgeTag = controlPointsTag; // this is a tag that will be stored with the edge
// is that a waste of memory or not...
// also mark the edge for later on
unsigned char used = 1;
_mb->tag_set_data( markTag, &edge, 1, &used );
}
// now divide fractions, to make them vary from 0 to 1
assert( _leng > 0. );
for( e = 0; e < _entities.size(); e++ )
_fractions[e] /= _leng;
}
Definition at line 377 of file SmoothCurve.cpp.
References _mb, _set, entities, ErrorCode, moab::Interface::get_entities_by_type(), MB_SUCCESS, MB_TYPE_DOUBLE, MBEDGE, moab::CartVect::normalize(), T, moab::Interface::tag_get_data(), moab::Interface::tag_get_handle(), moab::Interface::tag_set_data(), and TC.
Referenced by moab::FBEngine::initializeSmoothing().
{
// will retrieve the edges in each set; they are retrieved in order they were put into, because
// these sets are "MESHSET_ORDERED"
// retrieve the tag handle for the tangents; it should have been created already
// this tangents are computed for the chain of edges that form a geometric edge
// some checks should be performed on the vertices, but we trust the correctness of the model
// completely (like the vertices should match in the chain...)
Tag tangentsTag;
ErrorCode rval = _mb->tag_get_handle( "TANGENTS", 6, MB_TYPE_DOUBLE, tangentsTag );
if( rval != MB_SUCCESS ) return; // some error should be thrown
std::vector< EntityHandle > entities;
_mb->get_entities_by_type( _set, MBEDGE, entities ); // no recursion!!
// basically, each tangent at a node will depend on previous tangent
int nbEdges = entities.size();
// now, we can advance in the loop
// the only special problem is if the first node coincides with the last node, then we should
// consider the closed loop; or maybe we should look at angles in that case too?
// also, should we look at the 2 semi-circles case? How to decide if we need to continue the
// "tangents" maybe we can do that later, and we can alter the tangents at the feature nodes, in
// the directions of the loops again, do we need to decide the "closed" loop or not? Not yet...
EntityHandle previousEdge = entities[0]; // this is the first edge in the chain
CartVect TP[2]; // tangents for the previous edge
rval = _mb->tag_get_data( tangentsTag, &previousEdge, 1, &TP[0] ); // tangents for previous edge
if( rval != MB_SUCCESS ) return; // some error should be thrown
CartVect TC[2]; // tangents for the current edge
EntityHandle currentEdge;
for( int i = 1; i < nbEdges; i++ )
{
// current edge will start after first one
currentEdge = entities[i];
rval = _mb->tag_get_data( tangentsTag, ¤tEdge, 1, &TC[0] ); //
if( rval != MB_SUCCESS ) return; // some error should be thrown
// now compute the new tangent at common vertex; reset tangents for previous edge and
// current edge a little bit of CPU and memory waste, but this is life
CartVect T = 0.5 * TC[0] + 0.5 * TP[1]; //
T.normalize();
TP[1] = T;
rval = _mb->tag_set_data( tangentsTag, &previousEdge, 1, &TP[0] ); //
if( rval != MB_SUCCESS ) return; // some error should be thrown
TC[0] = T;
rval = _mb->tag_set_data( tangentsTag, ¤tEdge, 1, &TC[0] ); //
if( rval != MB_SUCCESS ) return; // some error should be thrown
// now set the next edge
previousEdge = currentEdge;
TP[0] = TC[0];
TP[1] = TC[1];
}
return;
}
| void moab::SmoothCurve::end_coordinates | ( | double & | x, |
| double & | y, | ||
| double & | z | ||
| ) | [virtual] |
Get the ending point of the curve.
| x | The x coordinate of the start point |
| y | The y coordinate of the start point |
| z | The z coordinate of the start point |
Definition at line 360 of file SmoothCurve.cpp.
References _entities, _mb, moab::Interface::get_connectivity(), and moab::Interface::get_coords().
{
int nnodes = 0;
const EntityHandle* conn2 = NULL;
_mb->get_connectivity( _entities[_entities.size() - 1], conn2, nnodes );
double c[3];
// careful, the second node here
_mb->get_coords( &conn2[1], 1, c );
x = c[0];
y = c[1];
z = c[2];
return;
}
| ErrorCode moab::SmoothCurve::evaluate_smooth_edge | ( | EntityHandle | eh, |
| double & | tt, | ||
| CartVect & | outv, | ||
| CartVect & | out_tangent | ||
| ) |
Definition at line 537 of file SmoothCurve.cpp.
References _edgeTag, _mb, ErrorCode, moab::Interface::get_connectivity(), moab::Interface::get_coords(), MB_SUCCESS, MB_TYPE_DOUBLE, moab::Interface::tag_get_data(), and moab::Interface::tag_get_handle().
Referenced by position_from_u().
{
CartVect P[2]; // P0 and P1
CartVect controlPoints[3]; // edge control points
double t4, t3, t2, one_minus_t, one_minus_t2, one_minus_t3, one_minus_t4;
// project the position to the linear edge
// t is from 0 to 1 only!!
// double tt = (t + 1) * 0.5;
if( tt <= 0.0 ) tt = 0.0;
if( tt >= 1.0 ) tt = 1.0;
int nnodes = 0;
const EntityHandle* conn2 = NULL;
ErrorCode rval = _mb->get_connectivity( eh, conn2, nnodes );
if( rval != MB_SUCCESS ) return rval;
rval = _mb->get_coords( conn2, 2, (double*)&P[0] );
if( rval != MB_SUCCESS ) return rval;
if( 0 == _edgeTag )
{
rval = _mb->tag_get_handle( "CONTROLEDGE", 9, MB_TYPE_DOUBLE, _edgeTag );
if( rval != MB_SUCCESS ) return rval;
}
rval = _mb->tag_get_data( _edgeTag, &eh, 1, (double*)&controlPoints[0] );
if( rval != MB_SUCCESS ) return rval;
t2 = tt * tt;
t3 = t2 * tt;
t4 = t3 * tt;
one_minus_t = 1. - tt;
one_minus_t2 = one_minus_t * one_minus_t;
one_minus_t3 = one_minus_t2 * one_minus_t;
one_minus_t4 = one_minus_t3 * one_minus_t;
outv = one_minus_t4 * P[0] + 4. * one_minus_t3 * tt * controlPoints[0] + 6. * one_minus_t2 * t2 * controlPoints[1] +
4. * one_minus_t * t3 * controlPoints[2] + t4 * P[1];
out_tangent = -4. * one_minus_t3 * P[0] + 4. * ( one_minus_t3 - 3. * tt * one_minus_t2 ) * controlPoints[0] +
12. * ( tt * one_minus_t2 - t2 * one_minus_t ) * controlPoints[1] +
4. * ( 3. * t2 * one_minus_t - t3 ) * controlPoints[2] + 4. * t3 * P[1];
return MB_SUCCESS;
}
| void moab::SmoothCurve::get_param_range | ( | double & | u_start, |
| double & | u_end | ||
| ) | [virtual] |
Get the parameter range of the curve.
| u_start | The beginning curve parameter |
| u_end | The ending curve parameter |
Definition at line 70 of file SmoothCurve.cpp.
Referenced by moab::FBEngine::getEntURange().
{
// assert(_ref_edge);
u_start = 0;
u_end = 1.;
return;
}
| bool moab::SmoothCurve::is_parametric | ( | ) | [virtual] |
Get the parametric status of the curve.
Definition at line 39 of file SmoothCurve.cpp.
{
return true;
}
| bool moab::SmoothCurve::is_periodic | ( | double & | period | ) | [virtual] |
Get the periodic status of the curve.
| period | The period of the curve if periodic. |
Definition at line 49 of file SmoothCurve.cpp.
References _leng, _mb, _set, moab::Interface::get_child_meshsets(), and moab::Range::size().
{
// assert(_ref_edge);
// return _ref_edge->is_periodic( period);
Range vsets;
_mb->get_child_meshsets( _set, vsets ); // num_hops =1
if( vsets.size() == 1 )
{
period = _leng;
return true; // true , especially for ice sheet data
}
return false;
}
| void moab::SmoothCurve::move_to_curve | ( | double & | x, |
| double & | y, | ||
| double & | z | ||
| ) | [virtual] |
Move a point near the curve to the closest point on the curve.
| x | The x coordinate of the point |
| y | The y coordinate of the point |
| z | The z coordinate of the point |
Definition at line 144 of file SmoothCurve.cpp.
References position_from_u(), and u_from_position().
Referenced by moab::FBEngine::getEntClosestPt().
{
// find closest point to the curve, and the parametric position
// must be close by, but how close ???
EntityHandle v;
int edgeIndex;
double u = u_from_position( x, y, z, v, edgeIndex );
position_from_u( u, x, y, z );
return;
}
| bool moab::SmoothCurve::position_from_u | ( | double | u, |
| double & | x, | ||
| double & | y, | ||
| double & | z, | ||
| double * | tg = NULL |
||
| ) | [virtual] |
Evaluate the curve at a specified parameter value.
| u | The parameter at which to evaluate the curve |
| x | The x coordinate of the evaluated point |
| y | The y coordinate of the evaluated point |
| z | The z coordinate of the evaluated point |
Definition at line 105 of file SmoothCurve.cpp.
References _entities, _fractions, ErrorCode, evaluate_smooth_edge(), MB_SUCCESS, and t.
Referenced by moab::FBEngine::getEntTgntU(), moab::FBEngine::getEntUtoXYZ(), and move_to_curve().
{
// _fractions are increasing, so find the
double* ptr = std::lower_bound( &_fractions[0], ( &_fractions[0] ) + _fractions.size(), u );
int index = ptr - &_fractions[0];
double nextFraction = _fractions[index];
double prevFraction = 0;
if( index > 0 )
{
prevFraction = _fractions[index - 1];
}
double t = ( u - prevFraction ) / ( nextFraction - prevFraction );
EntityHandle edge = _entities[index];
CartVect position, tangent;
ErrorCode rval = evaluate_smooth_edge( edge, t, position, tangent );
if( MB_SUCCESS != rval ) return false;
assert( rval == MB_SUCCESS );
x = position[0];
y = position[1];
z = position[2];
if( tg )
{
// we need to do some scaling,
double dtdu = 1 / ( nextFraction - prevFraction );
tg[0] = tangent[0] * dtdu;
tg[1] = tangent[1] * dtdu;
tg[2] = tangent[2] * dtdu;
}
return true;
}
| void moab::SmoothCurve::start_coordinates | ( | double & | x, |
| double & | y, | ||
| double & | z | ||
| ) | [virtual] |
Get the starting point of the curve.
| x | The x coordinate of the start point |
| y | The y coordinate of the start point |
| z | The z coordinate of the start point |
Definition at line 339 of file SmoothCurve.cpp.
References _entities, _mb, moab::Interface::get_connectivity(), and moab::Interface::get_coords().
{
int nnodes = 0;
const EntityHandle* conn2 = NULL;
_mb->get_connectivity( _entities[0], conn2, nnodes );
double c[3];
_mb->get_coords( conn2, 1, c );
x = c[0];
y = c[1];
z = c[2];
return;
}
| double moab::SmoothCurve::u_from_arc_length | ( | double | u_root, |
| double | arc_leng | ||
| ) | [virtual] |
Compute the parameter value at a specified distance along the curve.
| u_root | The start parameter from which to compute the distance along the curve. |
| arc_length | The distance to move along the curve. |
Definition at line 92 of file SmoothCurve.cpp.
References _leng.
| double moab::SmoothCurve::u_from_position | ( | double | x, |
| double | y, | ||
| double | z, | ||
| EntityHandle & | v, | ||
| int & | edgeIndex | ||
| ) | [virtual] |
Get the u parameter value on the curve closest to x,y,z and the point on the curve.
| x | The x coordinate of the point |
| y | The y coordinate of the point |
| z | The z coordinate of the point |
Definition at line 165 of file SmoothCurve.cpp.
References _edgeTag, _entities, _fractions, _mb, delta_t, ErrorCode, moab::Interface::get_connectivity(), moab::Interface::get_coords(), length(), length_squared(), moab::CartVect::length_squared(), MB_SUCCESS, MB_TYPE_DOUBLE, moab::Interface::tag_get_data(), moab::Interface::tag_get_handle(), and moab::tolerance.
Referenced by move_to_curve(), and moab::FBEngine::split_edge_at_point().
{
// this is an iterative process, expensive usually
// get first all nodes , and their positions
// find the closest node (and edge), and from there do some
// iterations up to a point
// do not exaggerate with convergence criteria
v = 0; // we do not have a close by vertex yet
CartVect initialPos( x, y, z );
double u = 0;
int nbNodes = (int)_entities.size() * 2; // the mesh edges are stored
std::vector< EntityHandle > nodesConnec;
nodesConnec.resize( nbNodes );
ErrorCode rval = this->_mb->get_connectivity( &( _entities[0] ), nbNodes / 2, nodesConnec );
if( MB_SUCCESS != rval )
{
std::cout << "error in getting connectivity\n";
return 0;
}
// collapse nodesConnec, nodes should be in order
for( int k = 0; k < nbNodes / 2; k++ )
{
nodesConnec[k + 1] = nodesConnec[2 * k + 1];
}
int numNodes = nbNodes / 2 + 1;
std::vector< CartVect > coordNodes;
coordNodes.resize( numNodes );
rval = _mb->get_coords( &( nodesConnec[0] ), numNodes, (double*)&( coordNodes[0] ) );
if( MB_SUCCESS != rval )
{
std::cout << "error in getting node positions\n";
return 0;
}
// find the closest node, then find the closest edge, based on closest node
int indexNode = 0;
double minDist = 1.e30;
// expensive linear search
for( int i = 0; i < numNodes; i++ )
{
double d1 = ( initialPos - coordNodes[i] ).length();
if( d1 < minDist )
{
indexNode = i;
minDist = d1;
}
}
double tolerance = 0.00001; // what is the unit?
// something reasonable
if( minDist < tolerance )
{
v = nodesConnec[indexNode];
// we are done, just return the proper u (from fractions)
if( indexNode == 0 )
{
return 0; // first node has u = 0
}
else
return _fractions[indexNode - 1]; // fractions[0] > 0!!)
}
// find the mesh edge; could be previous or next edge
edgeIndex = indexNode; // could be the previous one, though!!
if( edgeIndex == numNodes - 1 )
edgeIndex--; // we have one less edge, and do not worry about next edge
else
{
if( edgeIndex > 0 )
{
// could be the previous; decide based on distance to the other
// nodes of the 2 connected edges
CartVect prevNodePos = coordNodes[edgeIndex - 1];
CartVect nextNodePos = coordNodes[edgeIndex + 1];
if( ( prevNodePos - initialPos ).length_squared() < ( nextNodePos - initialPos ).length_squared() )
{
edgeIndex--;
}
}
}
// now, we know for sure that the closest point is somewhere on edgeIndex edge
//
// do newton iteration for local t between 0 and 1
// copy from evaluation method
CartVect P[2]; // P0 and P1
CartVect controlPoints[3]; // edge control points
double t4, t3, t2, one_minus_t, one_minus_t2, one_minus_t3, one_minus_t4;
P[0] = coordNodes[edgeIndex];
P[1] = coordNodes[edgeIndex + 1];
if( 0 == _edgeTag )
{
rval = _mb->tag_get_handle( "CONTROLEDGE", 9, MB_TYPE_DOUBLE, _edgeTag );
if( rval != MB_SUCCESS ) return 0;
}
rval = _mb->tag_get_data( _edgeTag, &( _entities[edgeIndex] ), 1, (double*)&controlPoints[0] );
if( rval != MB_SUCCESS ) return rval;
// starting point
double tt = 0.5; // between the 2 ends of the edge
int iterations = 0;
// find iteratively a better point
int maxIterations = 10; // not too many
CartVect outv;
// we will solve minimize F = 0.5 * ( ini - r(t) )^2
// so solve F'(t) = 0
// Iteration: t_ -> t - F'(t)/F"(t)
// F'(t) = r'(t) (ini-r(t) )
// F"(t) = r"(t) (ini-r(t) ) - (r'(t))^2
while( iterations < maxIterations )
//
{
t2 = tt * tt;
t3 = t2 * tt;
t4 = t3 * tt;
one_minus_t = 1. - tt;
one_minus_t2 = one_minus_t * one_minus_t;
one_minus_t3 = one_minus_t2 * one_minus_t;
one_minus_t4 = one_minus_t3 * one_minus_t;
outv = one_minus_t4 * P[0] + 4. * one_minus_t3 * tt * controlPoints[0] +
6. * one_minus_t2 * t2 * controlPoints[1] + 4. * one_minus_t * t3 * controlPoints[2] + t4 * P[1];
CartVect out_tangent = -4. * one_minus_t3 * P[0] +
4. * ( one_minus_t3 - 3. * tt * one_minus_t2 ) * controlPoints[0] +
12. * ( tt * one_minus_t2 - t2 * one_minus_t ) * controlPoints[1] +
4. * ( 3. * t2 * one_minus_t - t3 ) * controlPoints[2] + 4. * t3 * P[1];
CartVect second_deriv =
12. * one_minus_t2 * P[0] +
4. * ( -3. * one_minus_t2 - 3. * one_minus_t2 + 6. * tt * one_minus_t ) * controlPoints[0] +
12. * ( one_minus_t2 - 4 * tt * one_minus_t + t2 ) * controlPoints[1] +
4. * ( 6. * tt - 12 * t2 ) * controlPoints[2] + 12. * t2 * P[1];
CartVect diff = outv - initialPos;
double F_d = out_tangent % diff;
double F_dd = second_deriv % diff + out_tangent.length_squared();
if( 0 == F_dd ) break; // get out, we found minimum?
double delta_t = -F_d / F_dd;
if( fabs( delta_t ) < 0.000001 ) break;
tt = tt + delta_t;
if( tt < 0 )
{
tt = 0.;
v = nodesConnec[edgeIndex]; // we are at end of mesh edge
break;
}
if( tt > 1 )
{
tt = 1;
v = nodesConnec[edgeIndex + 1]; // we are at one end
break;
}
iterations++;
}
// so we have t on the segment, convert to u, which should
// be between _fractions[edgeIndex] numbers
double prevFraction = 0;
if( edgeIndex > 0 ) prevFraction = _fractions[edgeIndex - 1];
u = prevFraction + tt * ( _fractions[edgeIndex] - prevFraction );
return u;
}
Tag moab::SmoothCurve::_edgeTag [private] |
Definition at line 134 of file SmoothCurve.hpp.
Referenced by compute_control_points_on_boundary_edges(), evaluate_smooth_edge(), SmoothCurve(), and u_from_position().
std::vector< EntityHandle > moab::SmoothCurve::_entities [private] |
Definition at line 128 of file SmoothCurve.hpp.
Referenced by compute_control_points_on_boundary_edges(), end_coordinates(), position_from_u(), start_coordinates(), and u_from_position().
std::vector< double > moab::SmoothCurve::_fractions [private] |
Definition at line 130 of file SmoothCurve.hpp.
Referenced by compute_control_points_on_boundary_edges(), position_from_u(), and u_from_position().
GeomTopoTool* moab::SmoothCurve::_gtt [private] |
Definition at line 138 of file SmoothCurve.hpp.
Referenced by compute_control_points_on_boundary_edges().
double moab::SmoothCurve::_leng [private] |
Definition at line 129 of file SmoothCurve.hpp.
Referenced by arc_length(), compute_control_points_on_boundary_edges(), is_periodic(), SmoothCurve(), and u_from_arc_length().
Interface* moab::SmoothCurve::_mb [private] |
Definition at line 136 of file SmoothCurve.hpp.
Referenced by compute_control_points_on_boundary_edges(), compute_tangents_for_each_edge(), end_coordinates(), evaluate_smooth_edge(), is_periodic(), start_coordinates(), and u_from_position().
EntityHandle moab::SmoothCurve::_set [private] |
Definition at line 137 of file SmoothCurve.hpp.
Referenced by compute_control_points_on_boundary_edges(), compute_tangents_for_each_edge(), and is_periodic().
 1.7.6.1.
Dark theme by Tilen Majerle. All rights reserved.
1.7.6.1.
Dark theme by Tilen Majerle. All rights reserved.