|
MOAB: Mesh Oriented datABase
(version 5.4.1)
|
|
MOAB: Mesh Oriented datABase
(version 5.4.1)
|
This class couples data between meshes. More...
#include <Coupler.hpp>
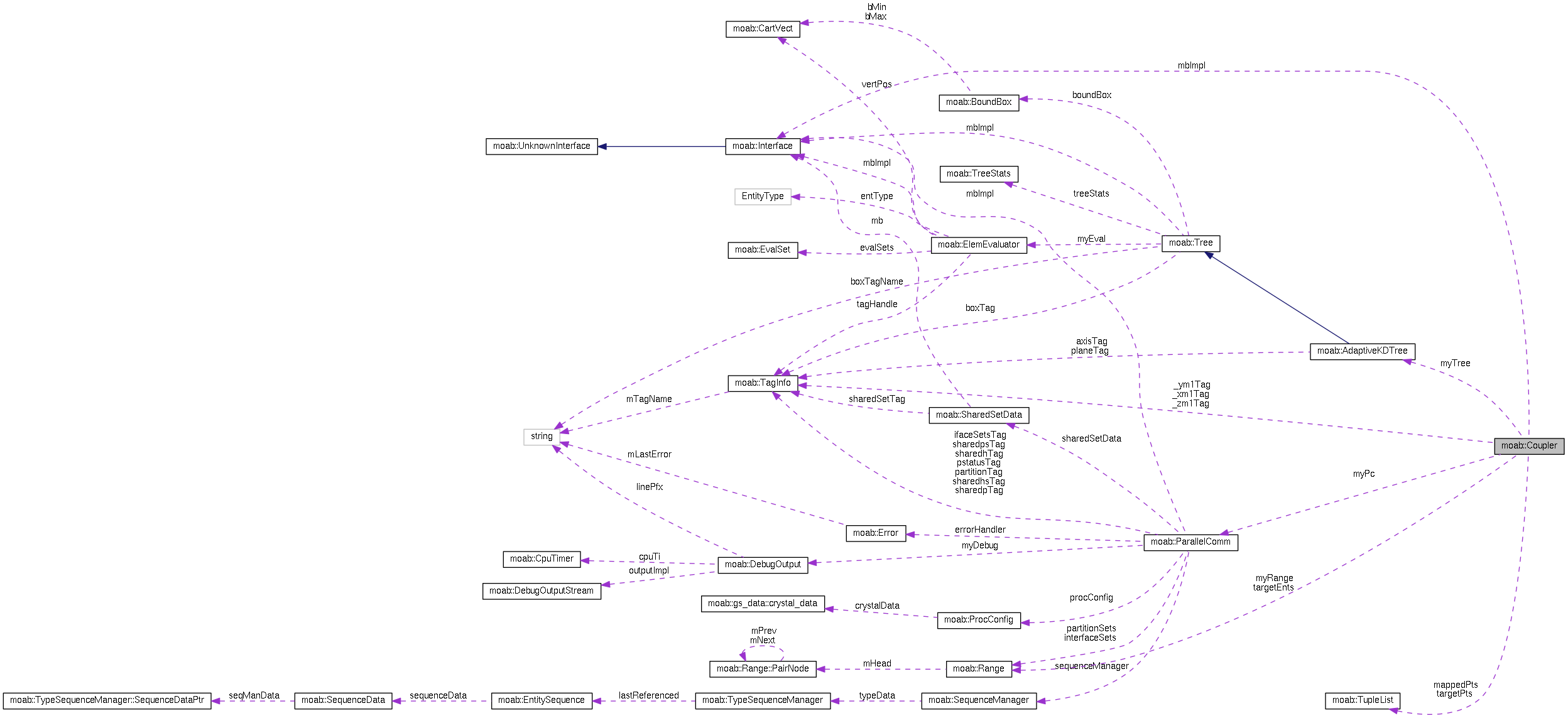
 Collaboration diagram for moab::Coupler:
Collaboration diagram for moab::Coupler:Public Types | |
| enum | Method { CONSTANT, LINEAR_FE, QUADRATIC_FE, SPECTRAL, SPHERICAL } |
| enum | IntegType { VOLUME } |
Public Member Functions | |
| Coupler (Interface *impl, ParallelComm *pc, Range &local_elems, int coupler_id, bool init_tree=true, int max_ent_dim=3) | |
| virtual | ~Coupler () |
| ErrorCode | initialize_tree () |
| Initialize the kdtree, locally and across communicator. | |
| ErrorCode | locate_points (double *xyz, unsigned int num_points, double rel_eps=0.0, double abs_eps=0.0, TupleList *tl=NULL, bool store_local=true) |
| ErrorCode | locate_points (Range &ents, double rel_eps=0.0, double abs_eps=0.0, TupleList *tl=NULL, bool store_local=true) |
| ErrorCode | interpolate (Coupler::Method method, Tag tag, double *interp_vals, TupleList *tl=NULL, bool normalize=true) |
| ErrorCode | interpolate (Coupler::Method method, const std::string &tag_name, double *interp_vals, TupleList *tl=NULL, bool normalize=true) |
| ErrorCode | interpolate (Coupler::Method *methods, const std::string *tag_names, int *points_per_method, int num_methods, double *interp_vals, TupleList *tl=NULL, bool normalize=true) |
| ErrorCode | interpolate (Coupler::Method *methods, Tag *tag_names, int *points_per_method, int num_methods, double *interp_vals, TupleList *tl=NULL, bool normalize=true) |
| ErrorCode | normalize_mesh (EntityHandle root_set, const char *norm_tag, Coupler::IntegType integ_type, int num_integ_pts) |
| ErrorCode | normalize_subset (EntityHandle root_set, const char *norm_tag, const char **tag_names, int num_tags, const char **tag_values, Coupler::IntegType integ_type, int num_integ_pts) |
| ErrorCode | normalize_subset (EntityHandle root_set, const char *norm_tag, Tag *tag_handles, int num_tags, const char **tag_values, Coupler::IntegType integ_type, int num_integ_pts) |
| ErrorCode | do_normalization (const char *norm_tag, std::vector< std::vector< EntityHandle > > &entity_sets, std::vector< std::vector< EntityHandle > > &entity_groups, Coupler::IntegType integ_type, int num_integ_pts) |
| ErrorCode | get_matching_entities (EntityHandle root_set, const char **tag_names, const char **tag_values, int num_tags, std::vector< std::vector< EntityHandle > > *entity_sets, std::vector< std::vector< EntityHandle > > *entity_groups) |
| ErrorCode | get_matching_entities (EntityHandle root_set, Tag *tag_handles, const char **tag_values, int num_tags, std::vector< std::vector< EntityHandle > > *entity_sets, std::vector< std::vector< EntityHandle > > *entity_groups) |
| ErrorCode | create_tuples (Range &ent_sets, const char **tag_names, unsigned int num_tags, TupleList **tuples) |
| ErrorCode | create_tuples (Range &ent_sets, Tag *tag_handles, unsigned int num_tags, TupleList **tuples) |
| ErrorCode | consolidate_tuples (TupleList **all_tuples, unsigned int num_tuples, TupleList **unique_tuples) |
| ErrorCode | get_group_integ_vals (std::vector< std::vector< EntityHandle > > &groups, std::vector< double > &integ_vals, const char *norm_tag, int num_integ_pts, Coupler::IntegType integ_type) |
| ErrorCode | apply_group_norm_factor (std::vector< std::vector< EntityHandle > > &entity_sets, std::vector< double > &norm_factors, const char *norm_tag, Coupler::IntegType integ_type) |
| ErrorCode | initialize_spectral_elements (EntityHandle rootSource, EntityHandle rootTarget, bool &specSou, bool &specTar) |
| ErrorCode | get_gl_points_on_elements (Range &targ_elems, std::vector< double > &vpos, int &numPointsOfInterest) |
| Interface * | mb_impl () const |
| AdaptiveKDTree * | my_tree () const |
| EntityHandle | local_root () const |
| const std::vector< double > & | all_boxes () const |
| ParallelComm * | my_pc () const |
| const Range & | target_ents () const |
| int | my_id () const |
| const Range & | my_range () const |
| TupleList * | mapped_pts () const |
| int | num_its () const |
| void | set_spherical (bool arg1=true) |
Private Member Functions | |
| ErrorCode | nat_param (double xyz[3], std::vector< EntityHandle > &entities, std::vector< CartVect > &nat_coords, double epsilon=0.0) |
| ErrorCode | interp_field (EntityHandle elem, CartVect nat_coord, Tag tag, double &field) |
| ErrorCode | constant_interp (EntityHandle elem, Tag tag, double &field) |
| ErrorCode | test_local_box (double *xyz, int from_proc, int remote_index, int index, bool &point_located, double rel_eps=0.0, double abs_eps=0.0, TupleList *tl=NULL) |
Private Attributes | |
| Interface * | mbImpl |
| AdaptiveKDTree * | myTree |
| EntityHandle | localRoot |
| std::vector< double > | allBoxes |
| ParallelComm * | myPc |
| int | myId |
| Range | myRange |
| Range | targetEnts |
| TupleList * | mappedPts |
| TupleList * | targetPts |
| int | numIts |
| int | max_dim |
| void * | _spectralSource |
| void * | _spectralTarget |
| moab::Tag | _xm1Tag |
| moab::Tag | _ym1Tag |
| moab::Tag | _zm1Tag |
| int | _ntot |
| bool | spherical |
This class couples data between meshes.
The coupler interpolates solution data at a set of points. Data being interpolated resides on a source mesh, in a tag. Applications calling this coupler send in entities, usually points or vertices, and receive back the tag value interpolated at those points. Entities in the source mesh containing those points do not have to reside on the same processor.
To use, an application should:
Multiple interpolations can be done after locating the points.
Definition at line 43 of file Coupler.hpp.
Definition at line 46 of file Coupler.hpp.
{
CONSTANT,
LINEAR_FE,
QUADRATIC_FE,
SPECTRAL,
SPHERICAL
};
| moab::Coupler::Coupler | ( | Interface * | impl, |
| ParallelComm * | pc, | ||
| Range & | local_elems, | ||
| int | coupler_id, | ||
| bool | init_tree = true, |
||
| int | max_ent_dim = 3 |
||
| ) |
Definition at line 47 of file Coupler.cpp.
References _spectralSource, _spectralTarget, moab::Range::empty(), initialize_tree(), mappedPts, myRange, myTree, and targetPts.
: mbImpl( impl ), myPc( pc ), myId( coupler_id ), numIts( 3 ), max_dim( max_ent_dim ), _ntot( 0 ), spherical( false ) { assert( NULL != impl && ( pc || !local_elems.empty() ) ); // Keep track of the local points, at least for now myRange = local_elems; myTree = NULL; // Now initialize the tree if( init_tree ) initialize_tree(); // Initialize tuple lists to indicate not initialized mappedPts = NULL; targetPts = NULL; _spectralSource = _spectralTarget = NULL; }
| moab::Coupler::~Coupler | ( | ) | [virtual] |
Definition at line 73 of file Coupler.cpp.
References _spectralSource, _spectralTarget, mappedPts, myTree, and targetPts.
{
// This will clear the cache
delete(moab::Element::SpectralHex*)_spectralSource;
delete(moab::Element::SpectralHex*)_spectralTarget;
delete myTree;
delete targetPts;
delete mappedPts;
}
| const std::vector< double >& moab::Coupler::all_boxes | ( | ) | const [inline] |
| ErrorCode moab::Coupler::apply_group_norm_factor | ( | std::vector< std::vector< EntityHandle > > & | entity_sets, |
| std::vector< double > & | norm_factors, | ||
| const char * | norm_tag, | ||
| Coupler::IntegType | integ_type | ||
| ) |
Definition at line 1787 of file Coupler.cpp.
References ErrorCode, ERRORR, MB_SUCCESS, MB_TAG_CREAT, MB_TAG_SPARSE, MB_TYPE_DOUBLE, mbImpl, moab::Interface::tag_get_handle(), and moab::Interface::tag_set_data().
Referenced by do_normalization(), and main().
{
ErrorCode err;
// Construct the new tag for the normalization factor from the norm_tag name
// and "_normf".
int norm_tag_len = strlen( norm_tag );
const char* normf_appd = "_normf";
int normf_appd_len = strlen( normf_appd );
char* normf_tag = (char*)malloc( norm_tag_len + normf_appd_len + 1 );
char* tmp_ptr = normf_tag;
memcpy( tmp_ptr, norm_tag, norm_tag_len );
tmp_ptr += norm_tag_len;
memcpy( tmp_ptr, normf_appd, normf_appd_len );
tmp_ptr += normf_appd_len;
*tmp_ptr = '\0';
Tag normf_hdl;
// Check to see if the tag exists. If not then create it and get the handle.
err = mbImpl->tag_get_handle( normf_tag, 1, moab::MB_TYPE_DOUBLE, normf_hdl,
moab::MB_TAG_SPARSE | moab::MB_TAG_CREAT );ERRORR( "Failed to create normalization factor tag.", err );
if( normf_hdl == NULL )
{
std::string msg( "Failed to create normalization factor tag named '" );
msg += std::string( normf_tag ) + std::string( "'" );ERRORR( msg.c_str(), MB_FAILURE );
}
free( normf_tag );
std::vector< std::vector< EntityHandle > >::iterator iter_i;
std::vector< EntityHandle >::iterator iter_j;
std::vector< double >::iterator iter_f;
double grp_norm_factor = 0.0;
// Loop over the entity sets
for( iter_i = entity_sets.begin(), iter_f = norm_factors.begin();
( iter_i != entity_sets.end() ) && ( iter_f != norm_factors.end() ); ++iter_i, ++iter_f )
{
grp_norm_factor = *iter_f;
// Loop over the all the entity sets in iter_i and set the
// new normf_tag with the norm factor value on each
for( iter_j = ( *iter_i ).begin(); iter_j != ( *iter_i ).end(); ++iter_j )
{
EntityHandle entset = *iter_j;
std::cout << "Coupler: applying normalization for entity set=" << entset
<< ", normalization_factor=" << grp_norm_factor << std::endl;
err = mbImpl->tag_set_data( normf_hdl, &entset, 1, &grp_norm_factor );ERRORR( "Failed to set normalization factor on entity set.", err );
}
}
return MB_SUCCESS;
}
| ErrorCode moab::Coupler::consolidate_tuples | ( | TupleList ** | all_tuples, |
| unsigned int | num_tuples, | ||
| TupleList ** | unique_tuples | ||
| ) |
Definition at line 1563 of file Coupler.cpp.
References moab::TupleList::enableWriteAccess(), moab::TupleList::get_n(), moab::TupleList::getTupleSize(), MB_SUCCESS, moab::TupleList::resize(), moab::TupleList::set_n(), sint, moab::TupleList::sort(), moab::TupleList::vi_rd, and moab::TupleList::vi_wr.
Referenced by get_matching_entities(), and main().
{
int total_rcv_tuples = 0;
int offset = 0, copysz = 0;
unsigned num_tags = 0;
uint ml, mul, mr;
uint* mi = (uint*)malloc( sizeof( uint ) * num_tuples );
for( unsigned int i = 0; i < num_tuples; i++ )
{
all_tuples[i]->getTupleSize( mi[i], ml, mul, mr );
}
for( unsigned int i = 0; i < num_tuples; i++ )
{
if( all_tuples[i] != NULL )
{
total_rcv_tuples += all_tuples[i]->get_n();
num_tags = mi[i];
}
}
const unsigned int_size = sizeof( sint );
const unsigned int_width = num_tags * int_size;
// Get the total size of all of the tuple_lists in all_tuples.
for( unsigned int i = 0; i < num_tuples; i++ )
{
if( all_tuples[i] != NULL ) total_rcv_tuples += all_tuples[i]->get_n();
}
// Copy the tuple_lists into a single tuple_list.
TupleList* all_tuples_list = new TupleList( num_tags, 0, 0, 0, total_rcv_tuples );
all_tuples_list->enableWriteAccess();
// all_tuples_list->initialize(num_tags, 0, 0, 0, total_rcv_tuples);
for( unsigned int i = 0; i < num_tuples; i++ )
{
if( all_tuples[i] != NULL )
{
copysz = all_tuples[i]->get_n() * int_width;
memcpy( all_tuples_list->vi_wr + offset, all_tuples[i]->vi_rd, copysz );
offset = offset + ( all_tuples[i]->get_n() * mi[i] );
all_tuples_list->set_n( all_tuples_list->get_n() + all_tuples[i]->get_n() );
}
}
// Sort the new tuple_list. Use a radix type sort, starting with the last (or least significant)
// tag column in the vi array and working towards the first (or most significant) tag column.
TupleList::buffer sort_buffer;
sort_buffer.buffer_init( 2 * total_rcv_tuples * int_width );
for( int i = num_tags - 1; i >= 0; i-- )
{
all_tuples_list->sort( i, &sort_buffer );
}
// Cycle through the sorted list eliminating duplicates.
// Keep counters to the current end of the tuple_list (w/out dups) and the last tuple examined.
unsigned int end_idx = 0, last_idx = 1;
while( last_idx < all_tuples_list->get_n() )
{
if( memcmp( all_tuples_list->vi_rd + ( end_idx * num_tags ), all_tuples_list->vi_rd + ( last_idx * num_tags ),
int_width ) == 0 )
{
// Values equal - skip
last_idx += 1;
}
else
{
// Values different - copy
// Move up the end index
end_idx += 1;
memcpy( all_tuples_list->vi_wr + ( end_idx * num_tags ), all_tuples_list->vi_rd + ( last_idx * num_tags ),
int_width );
last_idx += 1;
}
}
// Update the count in all_tuples_list
all_tuples_list->set_n( end_idx + 1 );
// Resize the tuple_list
all_tuples_list->resize( all_tuples_list->get_n() );
// Set the output parameter
*unique_tuples = all_tuples_list;
return MB_SUCCESS;
}
| ErrorCode moab::Coupler::constant_interp | ( | EntityHandle | elem, |
| Tag | tag, | ||
| double & | field | ||
| ) | [private] |
Definition at line 1111 of file Coupler.cpp.
References ErrorCode, MB_SUCCESS, mbImpl, and moab::Interface::tag_get_data().
Referenced by interpolate().
{
double tempField;
// Get the tag values at the vertices
ErrorCode result = mbImpl->tag_get_data( tag, &elem, 1, &tempField );
if( MB_SUCCESS != result ) return result;
field = tempField;
return MB_SUCCESS;
}
| ErrorCode moab::Coupler::create_tuples | ( | Range & | ent_sets, |
| const char ** | tag_names, | ||
| unsigned int | num_tags, | ||
| TupleList ** | tuples | ||
| ) |
Definition at line 1506 of file Coupler.cpp.
References ErrorCode, ERRORR, MB_TAG_ANY, MB_TYPE_DOUBLE, mbImpl, t, and moab::Interface::tag_get_handle().
Referenced by get_matching_entities(), and main().
{
ErrorCode err;
std::vector< Tag > tag_handles;
for( unsigned int t = 0; t < num_tags; t++ )
{
// Get tag handle & size
Tag th;
err = mbImpl->tag_get_handle( tag_names[t], 1, moab::MB_TYPE_DOUBLE, th, moab::MB_TAG_ANY );ERRORR( "Failed to get tag handle.", err );
tag_handles.push_back( th );
}
return create_tuples( ent_sets, &tag_handles[0], num_tags, tuple_list );
}
| ErrorCode moab::Coupler::create_tuples | ( | Range & | ent_sets, |
| Tag * | tag_handles, | ||
| unsigned int | num_tags, | ||
| TupleList ** | tuples | ||
| ) |
Definition at line 1528 of file Coupler.cpp.
References moab::TupleList::disableWriteAccess(), moab::TupleList::enableWriteAccess(), ErrorCode, ERRORR, moab::TupleList::getTupleSize(), moab::TupleList::inc_n(), MB_SUCCESS, mbImpl, moab::Range::size(), moab::Interface::tag_get_data(), and moab::TupleList::vi_wr.
{
// ASSUMPTION: All tags are of type integer. This may need to be expanded in future.
ErrorCode err;
// Allocate a tuple_list for the number of entity sets passed in
TupleList* tag_tuples = new TupleList( num_tags, 0, 0, 0, (int)ent_sets.size() );
// tag_tuples->initialize(num_tags, 0, 0, 0, num_sets);
uint mi, ml, mul, mr;
tag_tuples->getTupleSize( mi, ml, mul, mr );
tag_tuples->enableWriteAccess();
if( mi == 0 ) ERRORR( "Failed to initialize tuple_list.", MB_FAILURE );
// Loop over the filtered entity sets retrieving each matching tag value one by one.
int val;
for( unsigned int i = 0; i < ent_sets.size(); i++ )
{
for( unsigned int j = 0; j < num_tags; j++ )
{
EntityHandle set_handle = ent_sets[i];
err = mbImpl->tag_get_data( tag_handles[j], &set_handle, 1, &val );ERRORR( "Failed to get integer tag data.", err );
tag_tuples->vi_wr[i * mi + j] = val;
}
// If we get here there was no error so increment n in the tuple_list
tag_tuples->inc_n();
}
tag_tuples->disableWriteAccess();
*tuples = tag_tuples;
return MB_SUCCESS;
}
| ErrorCode moab::Coupler::do_normalization | ( | const char * | norm_tag, |
| std::vector< std::vector< EntityHandle > > & | entity_sets, | ||
| std::vector< std::vector< EntityHandle > > & | entity_groups, | ||
| Coupler::IntegType | integ_type, | ||
| int | num_integ_pts | ||
| ) |
Definition at line 1203 of file Coupler.cpp.
References apply_group_norm_factor(), ErrorCode, ERRORMPI, ERRORR, get_group_integ_vals(), ierr, MASTER_PROC, MPI_COMM_WORLD, myPc, moab::ProcConfig::proc_comm(), moab::ParallelComm::proc_config(), and rank.
Referenced by normalize_mesh(), and normalize_subset().
{
// SLAVE START ****************************************************************
ErrorCode err;
int ierr = 0;
// Setup data for parallel computing
int nprocs, rank;
ierr = MPI_Comm_size( MPI_COMM_WORLD, &nprocs );
ERRORMPI( "Getting number of procs failed.", ierr );
ierr = MPI_Comm_rank( MPI_COMM_WORLD, &rank );
ERRORMPI( "Getting rank failed.", ierr );
// Get the integrated field value for each group(vector) of entities.
// If no entities are in a group then a zero will be put in the list
// of return values.
unsigned int num_ent_grps = entity_groups.size();
std::vector< double > integ_vals( num_ent_grps );
err = get_group_integ_vals( entity_groups, integ_vals, norm_tag, num_integ_pts, integ_type );ERRORR( "Failed to get integrated field values for groups in mesh.", err );
// SLAVE END ****************************************************************
// SLAVE/MASTER START #########################################################
// Send list of integrated values back to master proc. The ordering of the
// values will match the ordering of the entity groups (i.e. vector of vectors)
// sent from master to slaves earlier. The values for each entity group will
// be summed during the transfer.
std::vector< double > sum_integ_vals( num_ent_grps );
if( nprocs > 1 )
{
// If parallel then send the values back to the master.
ierr = MPI_Reduce( &integ_vals[0], &sum_integ_vals[0], num_ent_grps, MPI_DOUBLE, MPI_SUM, MASTER_PROC,
myPc->proc_config().proc_comm() );
ERRORMPI( "Transfer and reduction of integrated values failed.", ierr );
}
else
{
// Otherwise just copy the vector
sum_integ_vals = integ_vals;
}
// SLAVE/MASTER END #########################################################
// MASTER START ***************************************************************
// Calculate the normalization factor for each group by taking the
// inverse of each integrated field value. Put the normalization factor
// for each group back into the list in the same order.
for( unsigned int i = 0; i < num_ent_grps; i++ )
{
double val = sum_integ_vals[i];
if( fabs( val ) > 1e-8 )
sum_integ_vals[i] = 1.0 / val;
else
{
sum_integ_vals[i] = 0.0; /* VSM: not sure what we should do here ? */
/* commenting out error below since if integral(value)=0.0, then normalization
is probably unnecessary to start with ? */
/* ERRORR("Integrating an invalid field -- integral("<<norm_tag<<") = "<<val<<".", err);
*/
}
}
// MASTER END ***************************************************************
// MASTER/SLAVE START #########################################################
if( nprocs > 1 )
{
// If parallel then broadcast the normalization factors to the procs.
ierr = MPI_Bcast( &sum_integ_vals[0], num_ent_grps, MPI_DOUBLE, MASTER_PROC, myPc->proc_config().proc_comm() );
ERRORMPI( "Broadcast of normalization factors failed.", ierr );
}
// MASTER/SLAVE END #########################################################
// SLAVE START ****************************************************************
// Save the normalization factors to a new tag with name of norm_tag's value
// and the string "_normF" appended. This new tag will be created on the entity
// set that contains all of the entities from a group.
err = apply_group_norm_factor( entity_sets, sum_integ_vals, norm_tag, integ_type );ERRORR( "Failed to set the normalization factor for groups in mesh.", err );
// SLAVE END ****************************************************************
return err;
}
| ErrorCode moab::Coupler::get_gl_points_on_elements | ( | Range & | targ_elems, |
| std::vector< double > & | vpos, | ||
| int & | numPointsOfInterest | ||
| ) |
Definition at line 1930 of file Coupler.cpp.
References _ntot, _xm1Tag, _ym1Tag, _zm1Tag, moab::Range::begin(), moab::Range::end(), ErrorCode, MB_SUCCESS, mbImpl, moab::Range::size(), and moab::Interface::tag_get_by_ptr().
{
numPointsOfInterest = targ_elems.size() * _ntot;
vpos.resize( 3 * numPointsOfInterest );
int ielem = 0;
for( Range::iterator eit = targ_elems.begin(); eit != targ_elems.end(); ++eit, ielem += _ntot * 3 )
{
EntityHandle eh = *eit;
const double* xval;
const double* yval;
const double* zval;
ErrorCode rval = mbImpl->tag_get_by_ptr( _xm1Tag, &eh, 1, (const void**)&xval );
if( moab::MB_SUCCESS != rval )
{
std::cout << "Can't get xm1 values \n";
return MB_FAILURE;
}
rval = mbImpl->tag_get_by_ptr( _ym1Tag, &eh, 1, (const void**)&yval );
if( moab::MB_SUCCESS != rval )
{
std::cout << "Can't get ym1 values \n";
return MB_FAILURE;
}
rval = mbImpl->tag_get_by_ptr( _zm1Tag, &eh, 1, (const void**)&zval );
if( moab::MB_SUCCESS != rval )
{
std::cout << "Can't get zm1 values \n";
return MB_FAILURE;
}
// Now, in a stride, populate vpos
for( int i = 0; i < _ntot; i++ )
{
vpos[ielem + 3 * i] = xval[i];
vpos[ielem + 3 * i + 1] = yval[i];
vpos[ielem + 3 * i + 2] = zval[i];
}
}
return MB_SUCCESS;
}
| ErrorCode moab::Coupler::get_group_integ_vals | ( | std::vector< std::vector< EntityHandle > > & | groups, |
| std::vector< double > & | integ_vals, | ||
| const char * | norm_tag, | ||
| int | num_integ_pts, | ||
| Coupler::IntegType | integ_type | ||
| ) |
Definition at line 1652 of file Coupler.cpp.
References ErrorCode, ERRORR, moab::Interface::get_connectivity(), moab::Interface::get_coords(), moab::Element::Map::integrate_scalar_field(), MB_SUCCESS, MB_TAG_CREAT, MB_TAG_SPARSE, MB_TYPE_DOUBLE, MB_UNSUPPORTED_OPERATION, MBEDGE, MBENTITYSET, MBHEX, mbImpl, MBQUAD, MBTET, moab::Interface::tag_get_data(), moab::Interface::tag_get_handle(), moab::Interface::type_from_handle(), and VOLUME.
Referenced by do_normalization(), and main().
{
ErrorCode err;
std::vector< std::vector< EntityHandle > >::iterator iter_i;
std::vector< EntityHandle >::iterator iter_j;
double grp_intrgr_val, intgr_val;
// Get the tag handle for norm_tag
Tag norm_hdl;
err =
mbImpl->tag_get_handle( norm_tag, 1, moab::MB_TYPE_DOUBLE, norm_hdl, moab::MB_TAG_SPARSE | moab::MB_TAG_CREAT );ERRORR( "Failed to get norm_tag handle.", err );
// Check size of integ_vals vector
if( integ_vals.size() != groups.size() ) integ_vals.resize( groups.size() );
// Loop over the groups(vectors) of entities
unsigned int i;
for( i = 0, iter_i = groups.begin(); iter_i != groups.end(); i++, ++iter_i )
{
grp_intrgr_val = 0;
// Loop over the all the entities in the group, integrating
// the field_fn over the entity in iter_j
for( iter_j = ( *iter_i ).begin(); iter_j != ( *iter_i ).end(); ++iter_j )
{
EntityHandle ehandle = ( *iter_j );
// Check that the entity in iter_j is of the same dimension as the
// integ_type we are performing
EntityType j_type;
j_type = mbImpl->type_from_handle( ehandle );ERRORR( "Failed to get entity type.", err );
// Skip any entities in the group that are not of the type being considered
if( ( integ_type == VOLUME ) && ( j_type < MBTET || j_type >= MBENTITYSET ) ) continue;
intgr_val = 0;
// Retrieve the vertices from the element
const EntityHandle* verts = NULL;
int connectivity_size = 0;
err = mbImpl->get_connectivity( ehandle, verts, connectivity_size, false );ERRORR( "Failed to get vertices from entity.", err );
// Get the vertex coordinates and the field values at the vertices.
double* coords = (double*)malloc( sizeof( double ) * ( 3 * connectivity_size ) );
/* TODO: VSM: check if this works for lower dimensions also without problems */
/* if (3 == geom_dim) */
err = mbImpl->get_coords( verts, connectivity_size, coords );ERRORR( "Failed to get vertex coordinates.", err );
/* allocate the field data array */
double* vfield = (double*)malloc( sizeof( double ) * ( connectivity_size ) );
err = mbImpl->tag_get_data( norm_hdl, verts, connectivity_size, vfield );
if( MB_SUCCESS != err )
{
free( coords );
}
ERRORR( "Failed to get vertex coordinates.", err );
// Get coordinates of all corner vertices (in normal order) and
// put in array of CartVec.
std::vector< CartVect > vertices( connectivity_size );
// Put the vertices into a CartVect vector
double* x = coords;
for( int j = 0; j < connectivity_size; j++, x += 3 )
{
vertices[j] = CartVect( x );
}
free( coords );
moab::Element::Map* elemMap;
if( j_type == MBHEX )
{
if( connectivity_size == 8 )
elemMap = new moab::Element::LinearHex( vertices );
else
elemMap = new moab::Element::QuadraticHex( vertices );
}
else if( j_type == MBTET )
{
elemMap = new moab::Element::LinearTet( vertices );
}
else if( j_type == MBQUAD )
{
elemMap = new moab::Element::LinearQuad( vertices );
}
/*
else if (j_type == MBTRI) {
elemMap = new moab::Element::LinearTri(vertices);
}
*/
else if( j_type == MBEDGE )
{
elemMap = new moab::Element::LinearEdge( vertices );
}
else
ERRORR( "Unknown topology type.", MB_UNSUPPORTED_OPERATION );
// Set the vertices in the Map and perform the integration
try
{
/* VSM: Do we need this call ?? */
// elemMap->set_vertices(vertices);
// Perform the actual integration over the element
intgr_val = elemMap->integrate_scalar_field( vfield );
// Combine the result with those of the group
grp_intrgr_val += intgr_val;
}
catch( moab::Element::Map::ArgError& )
{
std::cerr << "Failed to set vertices on Element::Map." << std::endl;
}
catch( moab::Element::Map::EvaluationError& )
{
std::cerr << "Failed to get inverse evaluation of coordinate on Element::Map." << std::endl;
}
delete( elemMap );
free( vfield );
}
// Set the group integrated value in the vector
integ_vals[i] = grp_intrgr_val;
}
return err;
}
| ErrorCode moab::Coupler::get_matching_entities | ( | EntityHandle | root_set, |
| const char ** | tag_names, | ||
| const char ** | tag_values, | ||
| int | num_tags, | ||
| std::vector< std::vector< EntityHandle > > * | entity_sets, | ||
| std::vector< std::vector< EntityHandle > > * | entity_groups | ||
| ) |
Definition at line 1293 of file Coupler.cpp.
References ErrorCode, ERRORR, MB_TAG_ANY, MB_TYPE_DOUBLE, mbImpl, t, and moab::Interface::tag_get_handle().
Referenced by main(), and normalize_subset().
{
ErrorCode err;
std::vector< Tag > tag_handles;
for( int t = 0; t < num_tags; t++ )
{
// Get tag handle & size
Tag th;
err = mbImpl->tag_get_handle( tag_names[t], 1, moab::MB_TYPE_DOUBLE, th, moab::MB_TAG_ANY );ERRORR( "Failed to get tag handle.", err );
tag_handles.push_back( th );
}
return get_matching_entities( root_set, &tag_handles[0], tag_values, num_tags, entity_sets, entity_groups );
}
| ErrorCode moab::Coupler::get_matching_entities | ( | EntityHandle | root_set, |
| Tag * | tag_handles, | ||
| const char ** | tag_values, | ||
| int | num_tags, | ||
| std::vector< std::vector< EntityHandle > > * | entity_sets, | ||
| std::vector< std::vector< EntityHandle > > * | entity_groups | ||
| ) |
Definition at line 1315 of file Coupler.cpp.
References moab::Range::clear(), consolidate_tuples(), create_tuples(), moab::debug, ErrorCode, ERRORMPI, ERRORR, moab::Interface::get_entities_by_handle(), moab::Interface::get_entities_by_type_and_tag(), moab::TupleList::get_n(), moab::TupleList::getTupleSize(), ierr, moab::Interface::INTERSECT, MASTER_PROC, MBENTITYSET, mbImpl, MPI_COMM_WORLD, myPc, moab::pack_tuples(), moab::ProcConfig::proc_comm(), moab::ParallelComm::proc_config(), rank, moab::TupleList::reset(), moab::Range::size(), moab::unpack_tuples(), and moab::TupleList::vi_rd.
{
// SLAVE START ****************************************************************
// Setup data for parallel computing
ErrorCode err;
int ierr = 0;
int nprocs, rank;
ierr = MPI_Comm_size( MPI_COMM_WORLD, &nprocs );
ERRORMPI( "Getting number of procs failed.", ierr );
ierr = MPI_Comm_rank( MPI_COMM_WORLD, &rank );
ERRORMPI( "Getting rank failed.", ierr );
Range ent_sets;
err =
mbImpl->get_entities_by_type_and_tag( root_set, moab::MBENTITYSET, tag_handles, (const void* const*)tag_values,
num_tags, ent_sets, Interface::INTERSECT, false );ERRORR( "Core::get_entities_by_type_and_tag failed.", err );
TupleList* tag_list = NULL;
err = create_tuples( ent_sets, tag_handles, num_tags, &tag_list );ERRORR( "Failed to create tuples from entity sets.", err );
// Free up range
ent_sets.clear();
// SLAVE END ****************************************************************
// If we are running in a multi-proc session then send tuple list back to master
// proc for consolidation. Otherwise just copy the pointer to the tuple_list.
TupleList* cons_tuples;
if( nprocs > 1 )
{
// SLAVE/MASTER START #########################################################
// Pack the tuple_list in a buffer.
uint* tuple_buf;
int tuple_buf_len;
tuple_buf_len = pack_tuples( tag_list, (void**)&tuple_buf );
// Free tag_list here as its not used again if nprocs > 1
tag_list->reset();
// Send back the buffer sizes to the master proc
int* recv_cnts = (int*)malloc( nprocs * sizeof( int ) );
int* offsets = (int*)malloc( nprocs * sizeof( int ) );
uint* all_tuples_buf = NULL;
MPI_Gather( &tuple_buf_len, 1, MPI_INT, recv_cnts, 1, MPI_INT, MASTER_PROC, myPc->proc_config().proc_comm() );
ERRORMPI( "Gathering buffer sizes failed.", err );
// Allocate a buffer large enough for all the data
if( rank == MASTER_PROC )
{
int all_tuples_len = recv_cnts[0];
offsets[0] = 0;
for( int i = 1; i < nprocs; i++ )
{
offsets[i] = offsets[i - 1] + recv_cnts[i - 1];
all_tuples_len += recv_cnts[i];
}
all_tuples_buf = (uint*)malloc( all_tuples_len * sizeof( uint ) );
}
// Send all buffers to the master proc for consolidation
MPI_Gatherv( (void*)tuple_buf, tuple_buf_len, MPI_INT, (void*)all_tuples_buf, recv_cnts, offsets, MPI_INT,
MASTER_PROC, myPc->proc_config().proc_comm() );
ERRORMPI( "Gathering tuple_lists failed.", err );
free( tuple_buf ); // malloc'd in pack_tuples
if( rank == MASTER_PROC )
{
// Unpack the tuple_list from the buffer.
TupleList** tl_array = (TupleList**)malloc( nprocs * sizeof( TupleList* ) );
for( int i = 0; i < nprocs; i++ )
unpack_tuples( (void*)&all_tuples_buf[offsets[i]], &tl_array[i] );
// Free all_tuples_buf here as it is only allocated on the MASTER_PROC
free( all_tuples_buf );
// SLAVE/MASTER END #########################################################
// MASTER START ***************************************************************
// Consolidate all tuple_lists into one tuple_list with no duplicates.
err = consolidate_tuples( tl_array, nprocs, &cons_tuples );ERRORR( "Failed to consolidate tuples.", err );
for( int i = 0; i < nprocs; i++ )
tl_array[i]->reset();
free( tl_array );
// MASTER END ***************************************************************
}
// Free offsets and recv_cnts as they are allocated on all procs
free( offsets );
free( recv_cnts );
// MASTER/SLAVE START #########################################################
// Broadcast condensed tuple list back to all procs.
uint* ctl_buf;
int ctl_buf_sz;
if( rank == MASTER_PROC ) ctl_buf_sz = pack_tuples( cons_tuples, (void**)&ctl_buf );
// Send buffer size
ierr = MPI_Bcast( &ctl_buf_sz, 1, MPI_INT, MASTER_PROC, myPc->proc_config().proc_comm() );
ERRORMPI( "Broadcasting tuple_list size failed.", ierr );
// Allocate a buffer in the other procs
if( rank != MASTER_PROC ) ctl_buf = (uint*)malloc( ctl_buf_sz * sizeof( uint ) );
ierr = MPI_Bcast( (void*)ctl_buf, ctl_buf_sz, MPI_INT, MASTER_PROC, myPc->proc_config().proc_comm() );
ERRORMPI( "Broadcasting tuple_list failed.", ierr );
if( rank != MASTER_PROC ) unpack_tuples( ctl_buf, &cons_tuples );
free( ctl_buf );
// MASTER/SLAVE END #########################################################
}
else
cons_tuples = tag_list;
// SLAVE START ****************************************************************
// Loop over the tuple list getting the entities with the tags in the tuple_list entry
uint mi, ml, mul, mr;
cons_tuples->getTupleSize( mi, ml, mul, mr );
for( unsigned int i = 0; i < cons_tuples->get_n(); i++ )
{
// Get Entity Sets that match the tags and values.
// Convert the data in the tuple_list to an array of pointers to the data
// in the tuple_list as that is what the iMesh API call is expecting.
int** vals = (int**)malloc( mi * sizeof( int* ) );
for( unsigned int j = 0; j < mi; j++ )
vals[j] = (int*)&( cons_tuples->vi_rd[( i * mi ) + j] );
// Get entities recursively based on type and tag data
err = mbImpl->get_entities_by_type_and_tag( root_set, moab::MBENTITYSET, tag_handles, (const void* const*)vals,
mi, ent_sets, Interface::INTERSECT, false );ERRORR( "Core::get_entities_by_type_and_tag failed.", err );
if( debug ) std::cout << "ent_sets_size=" << ent_sets.size() << std::endl;
// Free up the array of pointers
free( vals );
// Loop over the entity sets and then free the memory for ent_sets.
std::vector< EntityHandle > ent_set_hdls;
std::vector< EntityHandle > ent_hdls;
for( unsigned int j = 0; j < ent_sets.size(); j++ )
{
// Save the entity set
ent_set_hdls.push_back( ent_sets[j] );
// Get all entities for the entity set
Range ents;
/* VSM: do we need to filter out entity sets ? */
err = mbImpl->get_entities_by_handle( ent_sets[j], ents, false );ERRORR( "Core::get_entities_by_handle failed.", err );
if( debug ) std::cout << "ents_size=" << ents.size() << std::endl;
// Save all of the entities from the entity set and free the memory for ents.
for( unsigned int k = 0; k < ents.size(); k++ )
{
ent_hdls.push_back( ents[k] );
}
ents.clear();
if( debug ) std::cout << "ent_hdls.size=" << ent_hdls.size() << std::endl;
}
// Free the entity set list for next tuple iteration.
ent_sets.clear();
// Push ent_set_hdls onto entity_sets, ent_hdls onto entity_groups
// and clear both ent_set_hdls and ent_hdls.
entity_sets->push_back( ent_set_hdls );
ent_set_hdls.clear();
entity_groups->push_back( ent_hdls );
ent_hdls.clear();
if( debug )
std::cout << "entity_sets->size=" << entity_sets->size()
<< ", entity_groups->size=" << entity_groups->size() << std::endl;
}
cons_tuples->reset();
// SLAVE END ****************************************************************
return err;
}
| ErrorCode moab::Coupler::initialize_spectral_elements | ( | EntityHandle | rootSource, |
| EntityHandle | rootTarget, | ||
| bool & | specSou, | ||
| bool & | specTar | ||
| ) |
Definition at line 196 of file Coupler.cpp.
References _ntot, _spectralSource, _spectralTarget, _xm1Tag, _ym1Tag, _zm1Tag, moab::Range::empty(), ErrorCode, moab::Interface::get_entities_by_type_and_tag(), MB_SUCCESS, MB_TYPE_DOUBLE, MB_TYPE_INTEGER, MBENTITYSET, mbImpl, moab::Interface::tag_get_data(), and moab::Interface::tag_get_handle().
{
/*void * _spectralSource;
void * _spectralTarget;*/
moab::Range spectral_sets;
moab::Tag sem_tag;
int sem_dims[3];
ErrorCode rval = mbImpl->tag_get_handle( "SEM_DIMS", 3, moab::MB_TYPE_INTEGER, sem_tag );
if( moab::MB_SUCCESS != rval )
{
std::cout << "Can't find tag, no spectral set\n";
return MB_SUCCESS; // Nothing to do, no spectral elements
}
rval = mbImpl->get_entities_by_type_and_tag( rootSource, moab::MBENTITYSET, &sem_tag, NULL, 1, spectral_sets );
if( moab::MB_SUCCESS != rval || spectral_sets.empty() )
std::cout << "Can't get sem set on source\n";
else
{
moab::EntityHandle firstSemSet = spectral_sets[0];
rval = mbImpl->tag_get_data( sem_tag, &firstSemSet, 1, (void*)sem_dims );
if( moab::MB_SUCCESS != rval ) return MB_FAILURE;
if( sem_dims[0] != sem_dims[1] || sem_dims[0] != sem_dims[2] )
{
std::cout << " dimensions are different. bail out\n";
return MB_FAILURE;
}
// Repeat for target sets
spectral_sets.empty();
// Now initialize a source spectral element !
_spectralSource = new moab::Element::SpectralHex( sem_dims[0] );
specSou = true;
}
// Repeat for target source
rval = mbImpl->get_entities_by_type_and_tag( rootTarget, moab::MBENTITYSET, &sem_tag, NULL, 1, spectral_sets );
if( moab::MB_SUCCESS != rval || spectral_sets.empty() )
std::cout << "Can't get sem set on target\n";
else
{
moab::EntityHandle firstSemSet = spectral_sets[0];
rval = mbImpl->tag_get_data( sem_tag, &firstSemSet, 1, (void*)sem_dims );
if( moab::MB_SUCCESS != rval ) return MB_FAILURE;
if( sem_dims[0] != sem_dims[1] || sem_dims[0] != sem_dims[2] )
{
std::cout << " dimensions are different. bail out\n";
return MB_FAILURE;
}
// Repeat for target sets
spectral_sets.empty();
// Now initialize a target spectral element !
_spectralTarget = new moab::Element::SpectralHex( sem_dims[0] );
specTar = true;
}
_ntot = sem_dims[0] * sem_dims[1] * sem_dims[2];
rval = mbImpl->tag_get_handle( "SEM_X", _ntot, moab::MB_TYPE_DOUBLE, _xm1Tag );
if( moab::MB_SUCCESS != rval )
{
std::cout << "Can't get xm1tag \n";
return MB_FAILURE;
}
rval = mbImpl->tag_get_handle( "SEM_Y", _ntot, moab::MB_TYPE_DOUBLE, _ym1Tag );
if( moab::MB_SUCCESS != rval )
{
std::cout << "Can't get ym1tag \n";
return MB_FAILURE;
}
rval = mbImpl->tag_get_handle( "SEM_Z", _ntot, moab::MB_TYPE_DOUBLE, _zm1Tag );
if( moab::MB_SUCCESS != rval )
{
std::cout << "Can't get zm1tag \n";
return MB_FAILURE;
}
return MB_SUCCESS;
}
Initialize the kdtree, locally and across communicator.
Definition at line 83 of file Coupler.cpp.
References allBoxes, moab::BoundBox::bMax, moab::BoundBox::bMin, box(), moab::Range::empty(), ErrorCode, moab::CartVect::get(), moab::Tree::get_bounding_box(), moab::Interface::get_connectivity(), moab::Interface::get_coords(), moab::AdaptiveKDTree::get_info(), moab::ParallelComm::get_part_entities(), moab::CartVect::length(), localRoot, max_dim, MB_SUCCESS, mbImpl, myPc, myRange, myTree, numIts, moab::ProcConfig::proc_comm(), moab::ParallelComm::proc_config(), moab::ProcConfig::proc_rank(), moab::ProcConfig::proc_size(), radius, and spherical.
Referenced by Coupler().
{
Range local_ents;
// Get entities on the local part
ErrorCode result = MB_SUCCESS;
if( myPc )
{
result = myPc->get_part_entities( local_ents, max_dim );
if( local_ents.empty() )
{
max_dim--;
result = myPc->get_part_entities( local_ents, max_dim ); // go one dimension lower
// right now, this is used for spherical meshes only
}
}
else
local_ents = myRange;
if( MB_SUCCESS != result || local_ents.empty() )
{
std::cout << "Problems getting source entities" << std::endl;
return result;
}
// Build the tree for local processor
int max_per_leaf = 6;
for( int i = 0; i < numIts; i++ )
{
std::ostringstream str;
str << "PLANE_SET=0;"
<< "MAX_PER_LEAF=" << max_per_leaf << ";";
if( spherical && !local_ents.empty() )
{
// get coordinates of one vertex, and use for radius computation
EntityHandle elem = local_ents[0];
const EntityHandle* conn;
int numn = 0;
mbImpl->get_connectivity( elem, conn, numn );
CartVect pos0;
mbImpl->get_coords( conn, 1, &( pos0[0] ) );
double radius = pos0.length();
str << "SPHERICAL=true;RADIUS=" << radius << ";";
}
FileOptions opts( str.str().c_str() );
myTree = new AdaptiveKDTree( mbImpl );
result = myTree->build_tree( local_ents, &localRoot, &opts );
if( MB_SUCCESS != result )
{
std::cout << "Problems building tree";
if( numIts != i )
{
delete myTree;
max_per_leaf *= 2;
std::cout << "; increasing elements/leaf to " << max_per_leaf << std::endl;
}
else
{
std::cout << "; exiting" << std::endl;
return result;
}
}
else
break; // Get out of tree building
}
// Get the bounding box for local tree
if( myPc )
allBoxes.resize( 6 * myPc->proc_config().proc_size() );
else
allBoxes.resize( 6 );
unsigned int my_rank = ( myPc ? myPc->proc_config().proc_rank() : 0 );
BoundBox box;
result = myTree->get_bounding_box( box, &localRoot );
if( MB_SUCCESS != result ) return result;
box.bMin.get( &allBoxes[6 * my_rank] );
box.bMax.get( &allBoxes[6 * my_rank + 3] );
// Now communicate to get all boxes
if( myPc )
{
int mpi_err;
#if( MPI_VERSION >= 2 )
// Use "in place" option
mpi_err = MPI_Allgather( MPI_IN_PLACE, 0, MPI_DATATYPE_NULL, &allBoxes[0], 6, MPI_DOUBLE,
myPc->proc_config().proc_comm() );
#else
{
std::vector< double > allBoxes_tmp( 6 * myPc->proc_config().proc_size() );
mpi_err = MPI_Allgather( &allBoxes[6 * my_rank], 6, MPI_DOUBLE, &allBoxes_tmp[0], 6, MPI_DOUBLE,
myPc->proc_config().proc_comm() );
allBoxes = allBoxes_tmp;
}
#endif
if( MPI_SUCCESS != mpi_err ) return MB_FAILURE;
}
/* std::ostringstream blah;
for(int i = 0; i < allBoxes.size(); i++)
blah << allBoxes[i] << " ";
std::cout << blah.str() << "\n";*/
#ifdef VERBOSE
double min[3] = { 0, 0, 0 }, max[3] = { 0, 0, 0 };
unsigned int dep;
myTree->get_info( localRoot, min, max, dep );
std::cout << "Proc " << my_rank << ": box min/max, tree depth = (" << min[0] << "," << min[1] << "," << min[2]
<< "), (" << max[0] << "," << max[1] << "," << max[2] << "), " << dep << std::endl;
#endif
return result;
}
| ErrorCode moab::Coupler::interp_field | ( | EntityHandle | elem, |
| CartVect | nat_coord, | ||
| Tag | tag, | ||
| double & | field | ||
| ) | [private] |
Definition at line 1021 of file Coupler.cpp.
References _spectralSource, ErrorCode, moab::Element::Map::evaluate_scalar_field(), moab::Element::SpectralHex::evaluate_scalar_field(), moab::Interface::get_connectivity(), MB_SUCCESS, MBHEX, mbImpl, MBQUAD, MBTET, MBTRI, moab::Interface::tag_get_by_ptr(), moab::Interface::tag_get_data(), and moab::Interface::type_from_handle().
Referenced by interpolate().
{
if( _spectralSource )
{
// Get tag values at the GL points for some field (Tag)
const double* vx;
ErrorCode rval = mbImpl->tag_get_by_ptr( tag, &elem, 1, (const void**)&vx );
if( moab::MB_SUCCESS != rval )
{
std::cout << "Can't get field values for the tag \n";
return MB_FAILURE;
}
Element::SpectralHex* spcHex = (Element::SpectralHex*)_spectralSource;
field = spcHex->evaluate_scalar_field( nat_coord, vx );
}
else
{
double vfields[27]; // Will work for linear hex, quadratic hex or Tets
moab::Element::Map* elemMap = NULL;
int num_verts = 0;
// Get the EntityType
// Get the tag values at the vertices
const EntityHandle* connect;
int num_connect;
ErrorCode result = mbImpl->get_connectivity( elem, connect, num_connect );
if( MB_SUCCESS != result ) return result;
EntityType etype = mbImpl->type_from_handle( elem );
if( MBHEX == etype )
{
if( 8 == num_connect )
{
elemMap = new moab::Element::LinearHex();
num_verts = 8;
}
else
{ /* (MBHEX == etype && 27 == num_connect) */
elemMap = new moab::Element::QuadraticHex();
num_verts = 27;
}
}
else if( MBTET == etype )
{
elemMap = new moab::Element::LinearTet();
num_verts = 4;
}
else if( MBQUAD == etype )
{
elemMap = new moab::Element::LinearQuad();
num_verts = 4;
}
else if( MBTRI == etype )
{
elemMap = new moab::Element::LinearTri();
num_verts = 3;
}
else
return MB_FAILURE;
result = mbImpl->tag_get_data( tag, connect, std::min( num_verts, num_connect ), vfields );
if( MB_SUCCESS != result )
{
delete elemMap;
return result;
}
// Function for the interpolation
field = 0;
// Check the number of vertices
assert( num_connect >= num_verts );
// Calculate the field
try
{
field = elemMap->evaluate_scalar_field( nat_coord, vfields );
}
catch( moab::Element::Map::EvaluationError& )
{
delete elemMap;
return MB_FAILURE;
}
delete elemMap;
}
return MB_SUCCESS;
}
| ErrorCode moab::Coupler::interpolate | ( | Coupler::Method | method, |
| Tag | tag, | ||
| double * | interp_vals, | ||
| TupleList * | tl = NULL, |
||
| bool | normalize = true |
||
| ) | [inline] |
Definition at line 565 of file Coupler.hpp.
References moab::TupleList::get_n(), and targetPts.
Referenced by interpolate(), and main().
{
int num_pts = ( tl ? tl->get_n() : targetPts->get_n() );
return interpolate( &method, &tag, &num_pts, 1, interp_vals, tl, normalize );
}
| ErrorCode moab::Coupler::interpolate | ( | Coupler::Method | method, |
| const std::string & | tag_name, | ||
| double * | interp_vals, | ||
| TupleList * | tl = NULL, |
||
| bool | normalize = true |
||
| ) |
Definition at line 645 of file Coupler.cpp.
References _ntot, _spectralSource, ErrorCode, interpolate(), MB_CHK_SET_ERR, MB_TYPE_DOUBLE, mbImpl, and moab::Interface::tag_get_handle().
{
Tag tag;
ErrorCode result;
if( _spectralSource )
{
result = mbImpl->tag_get_handle( interp_tag.c_str(), _ntot, MB_TYPE_DOUBLE, tag );MB_CHK_SET_ERR( result, "Failed to get handle for interpolation tag \"" << interp_tag << "\"" );
}
else
{
result = mbImpl->tag_get_handle( interp_tag.c_str(), 1, MB_TYPE_DOUBLE, tag );MB_CHK_SET_ERR( result, "Failed to get handle for interpolation tag \"" << interp_tag << "\"" );
}
return interpolate( method, tag, interp_vals, tl, normalize );
}
| ErrorCode moab::Coupler::interpolate | ( | Coupler::Method * | methods, |
| const std::string * | tag_names, | ||
| int * | points_per_method, | ||
| int | num_methods, | ||
| double * | interp_vals, | ||
| TupleList * | tl = NULL, |
||
| bool | normalize = true |
||
| ) |
| ErrorCode moab::Coupler::interpolate | ( | Coupler::Method * | methods, |
| Tag * | tag_names, | ||
| int * | points_per_method, | ||
| int | num_methods, | ||
| double * | interp_vals, | ||
| TupleList * | tl = NULL, |
||
| bool | normalize = true |
||
| ) |
Definition at line 665 of file Coupler.cpp.
References CONSTANT, constant_interp(), moab::ProcConfig::crystal_router(), moab::TupleList::enableWriteAccess(), ErrorCode, moab::TupleList::get_n(), moab::TupleList::inc_n(), moab::TupleList::initialize(), interp_field(), LINEAR_FE, mappedPts, MB_SUCCESS, myPc, moab::ParallelComm::proc_config(), QUADRATIC_FE, SPHERICAL, t, targetPts, moab::TupleList::vi_rd, moab::TupleList::vi_wr, moab::TupleList::vr_rd, moab::TupleList::vr_wr, and moab::TupleList::vul_rd.
{
// if (!((LINEAR_FE == method) || (CONSTANT == method)))
// return MB_FAILURE;
// remote pts first
TupleList* tl_tmp = ( tl ? tl : targetPts );
ErrorCode result = MB_SUCCESS;
unsigned int pts_total = 0;
for( int i = 0; i < num_methods; i++ )
pts_total += points_per_method[i];
// If tl was passed in non-NULL, just have those points, otherwise have targetPts plus
// locally mapped pts
if( pts_total != tl_tmp->get_n() ) return MB_FAILURE;
TupleList tinterp;
tinterp.initialize( 5, 0, 0, 1, tl_tmp->get_n() );
int t = 0;
tinterp.enableWriteAccess();
for( int i = 0; i < num_methods; i++ )
{
for( int j = 0; j < points_per_method[i]; j++ )
{
tinterp.vi_wr[5 * t] = tl_tmp->vi_rd[3 * t];
tinterp.vi_wr[5 * t + 1] = tl_tmp->vi_rd[3 * t + 1];
tinterp.vi_wr[5 * t + 2] = tl_tmp->vi_rd[3 * t + 2];
tinterp.vi_wr[5 * t + 3] = methods[i];
tinterp.vi_wr[5 * t + 4] = i;
tinterp.vr_wr[t] = 0.0;
tinterp.inc_n();
t++;
}
}
// Scatter/gather interpolation points
if( myPc )
{
( myPc->proc_config().crystal_router() )->gs_transfer( 1, tinterp, 0 );
// Perform interpolation on local source mesh; put results into
// tinterp.vr_wr[i]
mappedPts->enableWriteAccess();
for( unsigned int i = 0; i < tinterp.get_n(); i++ )
{
int mindex = tinterp.vi_rd[5 * i + 2];
Method method = (Method)tinterp.vi_rd[5 * i + 3];
Tag tag = tags[tinterp.vi_rd[5 * i + 4]];
result = MB_FAILURE;
if( LINEAR_FE == method || QUADRATIC_FE == method || SPHERICAL == method )
{
result = interp_field( mappedPts->vul_rd[mindex], CartVect( mappedPts->vr_wr + 3 * mindex ), tag,
tinterp.vr_wr[i] );
}
else if( CONSTANT == method )
{
result = constant_interp( mappedPts->vul_rd[mindex], tag, tinterp.vr_wr[i] );
}
if( MB_SUCCESS != result ) return result;
}
// Scatter/gather interpolation data
myPc->proc_config().crystal_router()->gs_transfer( 1, tinterp, 0 );
}
// Copy the interpolated field as a unit
for( unsigned int i = 0; i < tinterp.get_n(); i++ )
interp_vals[tinterp.vi_rd[5 * i + 1]] = tinterp.vr_rd[i];
// Done
return MB_SUCCESS;
}
| EntityHandle moab::Coupler::local_root | ( | ) | const [inline] |
| ErrorCode moab::Coupler::locate_points | ( | double * | xyz, |
| unsigned int | num_points, | ||
| double | rel_eps = 0.0, |
||
| double | abs_eps = 0.0, |
||
| TupleList * | tl = NULL, |
||
| bool | store_local = true |
||
| ) |
Definition at line 319 of file Coupler.cpp.
References allBoxes, box(), moab::ProcConfig::crystal_router(), moab::TupleList::disableWriteAccess(), moab::BoundBox::distance(), moab::TupleList::enableWriteAccess(), ErrorCode, moab::TupleList::get_max(), moab::TupleList::get_n(), moab::TupleList::inc_n(), moab::TupleList::initialize(), mappedPts, MB_SUCCESS, myPc, moab::ParallelComm::proc_config(), moab::ProcConfig::proc_rank(), moab::ProcConfig::proc_size(), moab::TupleList::reset(), moab::TupleList::resize(), moab::TupleList::set_n(), targetPts, test_local_box(), moab::TupleList::vi_rd, moab::TupleList::vi_wr, and moab::TupleList::vr_wr.
Referenced by locate_points(), and main().
{
assert( tl || store_local );
// target_pts: TL(to_proc, tgt_index, x, y, z): tuples sent to source mesh procs representing
// pts to be located source_pts: TL(from_proc, tgt_index, src_index): results of source mesh
// proc point location, ready to send
// back to tgt procs; src_index of -1 indicates point not located (arguably not
// useful...)
TupleList target_pts;
target_pts.initialize( 2, 0, 0, 3, num_points );
target_pts.enableWriteAccess();
TupleList source_pts;
mappedPts = new TupleList( 0, 0, 1, 3, target_pts.get_max() );
mappedPts->enableWriteAccess();
source_pts.initialize( 3, 0, 0, 0, target_pts.get_max() );
source_pts.enableWriteAccess();
mappedPts->set_n( 0 );
source_pts.set_n( 0 );
ErrorCode result;
unsigned int my_rank = ( myPc ? myPc->proc_config().proc_rank() : 0 );
bool point_located;
// For each point, find box(es) containing the point,
// appending results to tuple_list;
// keep local points separately, in local_pts, which has pairs
// of <local_index, mapped_index>, where mapped_index is the index
// into the mappedPts tuple list
for( unsigned int i = 0; i < 3 * num_points; i += 3 )
{
std::vector< int > procs_to_send_to;
for( unsigned int j = 0; j < ( myPc ? myPc->proc_config().proc_size() : 0 ); j++ )
{
// Test if point is in proc's box
if( ( allBoxes[6 * j] <= xyz[i] + abs_eps ) && ( xyz[i] <= allBoxes[6 * j + 3] + abs_eps ) &&
( allBoxes[6 * j + 1] <= xyz[i + 1] + abs_eps ) && ( xyz[i + 1] <= allBoxes[6 * j + 4] + abs_eps ) &&
( allBoxes[6 * j + 2] <= xyz[i + 2] + abs_eps ) && ( xyz[i + 2] <= allBoxes[6 * j + 5] + abs_eps ) )
{
// If in this proc's box, will send to proc to test further
procs_to_send_to.push_back( j );
}
}
if( procs_to_send_to.empty() )
{
#ifdef VERBOSE
std::cout << " point index " << i / 3 << ": " << xyz[i] << " " << xyz[i + 1] << " " << xyz[i + 2]
<< " not found in any box\n";
#endif
// try to find the closest box, and put it in that box, anyway
double min_dist = 1.e+20;
int index = -1;
for( unsigned int j = 0; j < ( myPc ? myPc->proc_config().proc_size() : 0 ); j++ )
{
BoundBox box( &allBoxes[6 * j] ); // form back the box
double distance = box.distance( &xyz[i] ); // will compute the distance in 3d, from the box
if( distance < min_dist )
{
index = j;
min_dist = distance;
}
}
if( index == -1 )
{
// need to abort early, nothing we can do
assert( "cannot locate any box for some points" );
// need a better exit strategy
}
#ifdef VERBOSE
std::cout << " point index " << i / 3 << " added to box for proc j:" << index << "\n";
#endif
procs_to_send_to.push_back( index ); // will send to just one proc, that has the closest box
}
// we finally decided to populate the tuple list for a list of processors
for( size_t k = 0; k < procs_to_send_to.size(); k++ )
{
unsigned int j = procs_to_send_to[k];
// Check size of tuple list, grow if we're at max
if( target_pts.get_n() == target_pts.get_max() )
target_pts.resize( std::max( 10.0, 1.5 * target_pts.get_max() ) );
target_pts.vi_wr[2 * target_pts.get_n()] = j;
target_pts.vi_wr[2 * target_pts.get_n() + 1] = i / 3;
target_pts.vr_wr[3 * target_pts.get_n()] = xyz[i];
target_pts.vr_wr[3 * target_pts.get_n() + 1] = xyz[i + 1];
target_pts.vr_wr[3 * target_pts.get_n() + 2] = xyz[i + 2];
target_pts.inc_n();
}
} // end for (unsigned int i = 0; ..
int num_to_me = 0;
for( unsigned int i = 0; i < target_pts.get_n(); i++ )
if( target_pts.vi_rd[2 * i] == (int)my_rank ) num_to_me++;
#ifdef VERBOSE
printf( "rank: %u local points: %u, nb sent target pts: %u mappedPts: %u num to me: %d \n", my_rank, num_points,
target_pts.get_n(), mappedPts->get_n(), num_to_me );
#endif
// Perform scatter/gather, to gather points to source mesh procs
if( myPc )
{
( myPc->proc_config().crystal_router() )->gs_transfer( 1, target_pts, 0 );
num_to_me = 0;
for( unsigned int i = 0; i < target_pts.get_n(); i++ )
{
if( target_pts.vi_rd[2 * i] == (int)my_rank ) num_to_me++;
}
#ifdef VERBOSE
printf( "rank: %u after first gs nb received_pts: %u; num_from_me = %d\n", my_rank, target_pts.get_n(),
num_to_me );
#endif
// After scatter/gather:
// target_pts.set_n(# points local proc has to map);
// target_pts.vi_wr[2*i] = proc sending point i
// target_pts.vi_wr[2*i + 1] = index of point i on sending proc
// target_pts.vr_wr[3*i..3*i + 2] = xyz of point i
//
// Mapping builds the tuple list:
// source_pts.set_n(target_pts.get_n())
// source_pts.vi_wr[3*i] = target_pts.vi_wr[2*i] = sending proc
// source_pts.vi_wr[3*i + 1] = index of point i on sending proc
// source_pts.vi_wr[3*i + 2] = index of mapped point (-1 if not mapped)
//
// Also, mapping builds local tuple_list mappedPts:
// mappedPts->set_n( # mapped points );
// mappedPts->vul_wr[i] = local handle of mapped entity
// mappedPts->vr_wr[3*i..3*i + 2] = natural coordinates in mapped entity
// Test target points against my elements
for( unsigned i = 0; i < target_pts.get_n(); i++ )
{
result = test_local_box( target_pts.vr_wr + 3 * i, target_pts.vi_rd[2 * i], target_pts.vi_rd[2 * i + 1], i,
point_located, rel_eps, abs_eps, &source_pts );
if( MB_SUCCESS != result ) return result;
}
// No longer need target_pts
target_pts.reset();
#ifdef VERBOSE
printf( "rank: %u nb sent source pts: %u, mappedPts now: %u\n", my_rank, source_pts.get_n(),
mappedPts->get_n() );
#endif
// Send target points back to target procs
( myPc->proc_config().crystal_router() )->gs_transfer( 1, source_pts, 0 );
#ifdef VERBOSE
printf( "rank: %u nb received source pts: %u\n", my_rank, source_pts.get_n() );
#endif
}
// Store proc/index tuples in targetPts, and/or pass back to application;
// the tuple this gets stored to looks like:
// tl.set_n(# mapped points);
// tl.vi_wr[3*i] = remote proc mapping point
// tl.vi_wr[3*i + 1] = local index of mapped point
// tl.vi_wr[3*i + 2] = remote index of mapped point
//
// Local index is mapped into either myRange, holding the handles of
// local mapped entities, or myXyz, holding locations of mapped pts
// Store information about located points
TupleList* tl_tmp;
if( !store_local )
tl_tmp = tl;
else
{
targetPts = new TupleList();
tl_tmp = targetPts;
}
tl_tmp->initialize( 3, 0, 0, 0, num_points );
tl_tmp->set_n( num_points ); // Automatically sets tl to write_enabled
// Initialize so we know afterwards how many pts weren't located
std::fill( tl_tmp->vi_wr, tl_tmp->vi_wr + 3 * num_points, -1 );
unsigned int local_pts = 0;
for( unsigned int i = 0; i < source_pts.get_n(); i++ )
{
if( -1 != source_pts.vi_rd[3 * i + 2] )
{ // Why bother sending message saying "i don't have the point" if it gets discarded?
int tgt_index = 3 * source_pts.vi_rd[3 * i + 1];
// Prefer always entities that are local, from the source_pts
// if a local entity was already found to contain the target point, skip
// tl_tmp->vi_wr[tgt_index] is -1 initially, but it could already be set with
// a remote processor
if( tl_tmp->vi_wr[tgt_index] != (int)my_rank )
{
tl_tmp->vi_wr[tgt_index] = source_pts.vi_rd[3 * i];
tl_tmp->vi_wr[tgt_index + 1] = source_pts.vi_rd[3 * i + 1];
tl_tmp->vi_wr[tgt_index + 2] = source_pts.vi_rd[3 * i + 2];
}
}
}
// Count missing points
unsigned int missing_pts = 0;
for( unsigned int i = 0; i < num_points; i++ )
{
if( tl_tmp->vi_rd[3 * i + 1] == -1 )
{
missing_pts++;
#ifdef VERBOSE
printf( "missing point at index i: %d -> %15.10f %15.10f %15.10f\n", i, xyz[3 * i], xyz[3 * i + 1],
xyz[3 * i + 2] );
#endif
}
else if( tl_tmp->vi_rd[3 * i] == (int)my_rank )
local_pts++;
}
#ifdef VERBOSE
printf( "rank: %u point location: wanted %u got %u locally, %u remote, missing %u\n", my_rank, num_points,
local_pts, num_points - missing_pts - local_pts, missing_pts );
#endif
assert( 0 == missing_pts ); // Will likely break on curved geometries
// No longer need source_pts
source_pts.reset();
// Copy into tl if passed in and storing locally
if( tl && store_local )
{
tl->initialize( 3, 0, 0, 0, num_points );
tl->enableWriteAccess();
memcpy( tl->vi_wr, tl_tmp->vi_rd, 3 * tl_tmp->get_n() * sizeof( int ) );
tl->set_n( tl_tmp->get_n() );
tl->disableWriteAccess();
}
tl_tmp->disableWriteAccess();
// Done
return MB_SUCCESS;
}
| ErrorCode moab::Coupler::locate_points | ( | Range & | ents, |
| double | rel_eps = 0.0, |
||
| double | abs_eps = 0.0, |
||
| TupleList * | tl = NULL, |
||
| bool | store_local = true |
||
| ) |
Definition at line 278 of file Coupler.cpp.
References ErrorCode, moab::Interface::get_connectivity(), moab::Interface::get_coords(), locate_points(), moab::CN::MAX_NODES_PER_ELEMENT, MB_SUCCESS, mbImpl, MBVERTEX, moab::Range::size(), moab::Range::subset_by_type(), moab::subtract(), and targetEnts.
{
// Get locations
std::vector< double > locs( 3 * targ_ents.size() );
Range verts = targ_ents.subset_by_type( MBVERTEX );
ErrorCode rval = mbImpl->get_coords( verts, &locs[0] );
if( MB_SUCCESS != rval ) return rval;
// Now get other ents; reuse verts
unsigned int num_verts = verts.size();
verts = subtract( targ_ents, verts );
// Compute centroids
std::vector< EntityHandle > dum_conn( CN::MAX_NODES_PER_ELEMENT );
std::vector< double > dum_pos( CN::MAX_NODES_PER_ELEMENT );
const EntityHandle* conn;
int num_conn;
double* coords = &locs[num_verts];
// Do this here instead of a function to allow reuse of dum_pos and dum_conn
for( Range::const_iterator rit = verts.begin(); rit != verts.end(); ++rit )
{
rval = mbImpl->get_connectivity( *rit, conn, num_conn, false, &dum_conn );
if( MB_SUCCESS != rval ) return rval;
rval = mbImpl->get_coords( conn, num_conn, &dum_pos[0] );
if( MB_SUCCESS != rval ) return rval;
coords[0] = coords[1] = coords[2] = 0.0;
for( int i = 0; i < num_conn; i++ )
{
coords[0] += dum_pos[3 * i];
coords[1] += dum_pos[3 * i + 1];
coords[2] += dum_pos[3 * i + 2];
}
coords[0] /= num_conn;
coords[1] /= num_conn;
coords[2] /= num_conn;
coords += 3;
}
if( store_local ) targetEnts = targ_ents;
return locate_points( &locs[0], targ_ents.size(), rel_eps, abs_eps, tl, store_local );
}
| TupleList* moab::Coupler::mapped_pts | ( | ) | const [inline] |
| Interface* moab::Coupler::mb_impl | ( | ) | const [inline] |
| int moab::Coupler::my_id | ( | ) | const [inline] |
| ParallelComm* moab::Coupler::my_pc | ( | ) | const [inline] |
| const Range& moab::Coupler::my_range | ( | ) | const [inline] |
| AdaptiveKDTree* moab::Coupler::my_tree | ( | ) | const [inline] |
| ErrorCode moab::Coupler::nat_param | ( | double | xyz[3], |
| std::vector< EntityHandle > & | entities, | ||
| std::vector< CartVect > & | nat_coords, | ||
| double | epsilon = 0.0 |
||
| ) | [private] |
Definition at line 749 of file Coupler.cpp.
References _spectralSource, _xm1Tag, _ym1Tag, _zm1Tag, moab::Range::begin(), moab::AdaptiveKDTree::distance_search(), moab::Range::end(), ErrorCode, moab::Interface::get_connectivity(), moab::Interface::get_coords(), moab::Interface::get_entities_by_dimension(), moab::AdaptiveKDTree::get_tree_iterator(), moab::AdaptiveKDTreeIter::handle(), moab::Interface::id_from_handle(), moab::Element::Map::ievaluate(), moab::Element::LinearTet::ievaluate(), moab::Element::SpectralHex::ievaluate(), moab::Element::SphericalQuad::ievaluate(), moab::Element::SphericalTri::ievaluate(), moab::Element::Map::inside_box(), moab::Element::LinearHex::inside_nat_space(), moab::Element::QuadraticHex::inside_nat_space(), moab::Element::LinearTet::inside_nat_space(), moab::Element::SpectralHex::inside_nat_space(), moab::Element::LinearQuad::inside_nat_space(), moab::Element::LinearTri::inside_nat_space(), moab::Element::LinearEdge::inside_nat_space(), localRoot, max_dim, MB_ENTITY_NOT_FOUND, MB_SUCCESS, MBEDGE, MBHEX, mbImpl, MBQUAD, MBTET, MBTRI, myTree, moab::AdaptiveKDTree::point_search(), moab::Element::SpectralHex::set_gl_points(), spherical, moab::Interface::tag_get_by_ptr(), and moab::Interface::type_from_handle().
Referenced by test_local_box().
{
if( !myTree ) return MB_FAILURE;
AdaptiveKDTreeIter treeiter;
ErrorCode result = myTree->get_tree_iterator( localRoot, treeiter );
if( MB_SUCCESS != result )
{
std::cout << "Problems getting iterator" << std::endl;
return result;
}
EntityHandle closest_leaf;
if( epsilon )
{
std::vector< double > dists;
std::vector< EntityHandle > leaves;
// Two tolerances
result = myTree->distance_search( xyz, epsilon, leaves,
/*iter_tol*/ epsilon,
/*inside_tol*/ 10 * epsilon, &dists, NULL, &localRoot );
if( leaves.empty() )
// Not found returns success here, with empty list, just like case with no epsilon
return MB_SUCCESS;
// Get closest leaf
double min_dist = *dists.begin();
closest_leaf = *leaves.begin();
std::vector< EntityHandle >::iterator vit = leaves.begin() + 1;
std::vector< double >::iterator dit = dists.begin() + 1;
for( ; vit != leaves.end() && min_dist; ++vit, ++dit )
{
if( *dit < min_dist )
{
min_dist = *dit;
closest_leaf = *vit;
}
}
}
else
{
result = myTree->point_search( xyz, treeiter, 1.0e-10, 1.0e-6, NULL, &localRoot );
if( MB_ENTITY_NOT_FOUND == result ) // Point is outside of myTree's bounding box
return MB_SUCCESS;
else if( MB_SUCCESS != result )
{
std::cout << "Problems getting leaf \n";
return result;
}
closest_leaf = treeiter.handle();
}
// Find natural coordinates of point in element(s) in that leaf
CartVect tmp_nat_coords;
Range range_leaf;
result = mbImpl->get_entities_by_dimension( closest_leaf, max_dim, range_leaf, false );
if( MB_SUCCESS != result ) std::cout << "Problem getting leaf in a range" << std::endl;
// Loop over the range_leaf
for( Range::iterator iter = range_leaf.begin(); iter != range_leaf.end(); ++iter )
{
// Test to find out in which entity the point is
// Get the EntityType and create the appropriate Element::Map subtype
// If spectral, do not need coordinates, just the GL points
EntityType etype = mbImpl->type_from_handle( *iter );
if( NULL != this->_spectralSource && MBHEX == etype )
{
EntityHandle eh = *iter;
const double* xval;
const double* yval;
const double* zval;
ErrorCode rval = mbImpl->tag_get_by_ptr( _xm1Tag, &eh, 1, (const void**)&xval );
if( moab::MB_SUCCESS != rval )
{
std::cout << "Can't get xm1 values \n";
return MB_FAILURE;
}
rval = mbImpl->tag_get_by_ptr( _ym1Tag, &eh, 1, (const void**)&yval );
if( moab::MB_SUCCESS != rval )
{
std::cout << "Can't get ym1 values \n";
return MB_FAILURE;
}
rval = mbImpl->tag_get_by_ptr( _zm1Tag, &eh, 1, (const void**)&zval );
if( moab::MB_SUCCESS != rval )
{
std::cout << "Can't get zm1 values \n";
return MB_FAILURE;
}
Element::SpectralHex* spcHex = (Element::SpectralHex*)_spectralSource;
spcHex->set_gl_points( (double*)xval, (double*)yval, (double*)zval );
try
{
tmp_nat_coords = spcHex->ievaluate( CartVect( xyz ), epsilon ); // introduce
bool inside = spcHex->inside_nat_space( CartVect( tmp_nat_coords ), epsilon );
if( !inside )
{
#ifdef VERBOSE
std::cout << "point " << xyz[0] << " " << xyz[1] << " " << xyz[2]
<< " is not converging inside hex " << mbImpl->id_from_handle( eh ) << "\n";
#endif
continue; // It is possible that the point is outside, so it will not converge
}
}
catch( Element::Map::EvaluationError& )
{
continue;
}
}
else
{
const EntityHandle* connect;
int num_connect;
// Get connectivity
result = mbImpl->get_connectivity( *iter, connect, num_connect, true );
if( MB_SUCCESS != result ) return result;
// Get coordinates of the vertices
std::vector< CartVect > coords_vert( num_connect );
result = mbImpl->get_coords( connect, num_connect, &( coords_vert[0][0] ) );
if( MB_SUCCESS != result )
{
std::cout << "Problems getting coordinates of vertices\n";
return result;
}
CartVect pos( xyz );
if( MBHEX == etype )
{
if( 8 == num_connect )
{
Element::LinearHex hexmap( coords_vert );
if( !hexmap.inside_box( pos, epsilon ) ) continue;
try
{
tmp_nat_coords = hexmap.ievaluate( pos, epsilon );
bool inside = hexmap.inside_nat_space( tmp_nat_coords, epsilon );
if( !inside ) continue;
}
catch( Element::Map::EvaluationError& )
{
continue;
}
}
else if( 27 == num_connect )
{
Element::QuadraticHex hexmap( coords_vert );
if( !hexmap.inside_box( pos, epsilon ) ) continue;
try
{
tmp_nat_coords = hexmap.ievaluate( pos, epsilon );
bool inside = hexmap.inside_nat_space( tmp_nat_coords, epsilon );
if( !inside ) continue;
}
catch( Element::Map::EvaluationError& )
{
continue;
}
}
else // TODO this case not treated yet, no interpolation
continue;
}
else if( MBTET == etype )
{
Element::LinearTet tetmap( coords_vert );
// This is just a linear solve; unless degenerate, will not except
tmp_nat_coords = tetmap.ievaluate( pos );
bool inside = tetmap.inside_nat_space( tmp_nat_coords, epsilon );
if( !inside ) continue;
}
else if( MBQUAD == etype && spherical )
{
Element::SphericalQuad sphermap( coords_vert );
/* skip box test, because it can filter out good elements with high curvature
* if (!sphermap.inside_box(pos, epsilon))
continue;*/
try
{
tmp_nat_coords = sphermap.ievaluate( pos, epsilon );
bool inside = sphermap.inside_nat_space( tmp_nat_coords, epsilon );
if( !inside ) continue;
}
catch( Element::Map::EvaluationError& )
{
continue;
}
}
else if( MBTRI == etype && spherical )
{
Element::SphericalTri sphermap( coords_vert );
/* skip box test, because it can filter out good elements with high curvature
* if (!sphermap.inside_box(pos, epsilon))
continue;*/
try
{
tmp_nat_coords = sphermap.ievaluate( pos, epsilon );
bool inside = sphermap.inside_nat_space( tmp_nat_coords, epsilon );
if( !inside ) continue;
}
catch( Element::Map::EvaluationError& )
{
continue;
}
}
else if( MBQUAD == etype )
{
Element::LinearQuad quadmap( coords_vert );
if( !quadmap.inside_box( pos, epsilon ) ) continue;
try
{
tmp_nat_coords = quadmap.ievaluate( pos, epsilon );
bool inside = quadmap.inside_nat_space( tmp_nat_coords, epsilon );
if( !inside ) continue;
}
catch( Element::Map::EvaluationError& )
{
continue;
}
if( !quadmap.inside_nat_space( tmp_nat_coords, epsilon ) ) continue;
}
/*
else if (etype == MBTRI){
Element::LinearTri trimap(coords_vert);
if (!trimap.inside_box( pos, epsilon))
continue;
try {
tmp_nat_coords = trimap.ievaluate(pos, epsilon);
bool inside = trimap.inside_nat_space(tmp_nat_coords, epsilon);
if (!inside) continue;
}
catch (Element::Map::EvaluationError) {
continue;
}
if (!trimap.inside_nat_space(tmp_nat_coords, epsilon))
continue;
}
*/
else if( etype == MBEDGE )
{
Element::LinearEdge edgemap( coords_vert );
try
{
tmp_nat_coords = edgemap.ievaluate( CartVect( xyz ), epsilon );
}
catch( Element::Map::EvaluationError )
{
continue;
}
if( !edgemap.inside_nat_space( tmp_nat_coords, epsilon ) ) continue;
}
else
{
std::cout << "Entity not Hex/Tet/Quad/Tri/Edge. Please verify." << std::endl;
continue;
}
}
// If we get here then we've found the coordinates.
// Save them and the entity and return success.
entities.push_back( *iter );
nat_coords.push_back( tmp_nat_coords );
return MB_SUCCESS;
}
// Didn't find any elements containing the point
return MB_SUCCESS;
}
| ErrorCode moab::Coupler::normalize_mesh | ( | EntityHandle | root_set, |
| const char * | norm_tag, | ||
| Coupler::IntegType | integ_type, | ||
| int | num_integ_pts | ||
| ) |
Definition at line 1125 of file Coupler.cpp.
References do_normalization(), entities, ErrorCode, ERRORR, moab::Interface::get_entities_by_handle(), and mbImpl.
{
ErrorCode err;
// SLAVE START ****************************************************************
// Search for entities based on tag_handles and tag_values
std::vector< std::vector< EntityHandle > > entity_sets;
std::vector< std::vector< EntityHandle > > entity_groups;
// put the root_set into entity_sets
std::vector< EntityHandle > ent_set;
ent_set.push_back( root_set );
entity_sets.push_back( ent_set );
// get all entities from root_set and put into entity_groups
std::vector< EntityHandle > entities;
err = mbImpl->get_entities_by_handle( root_set, entities, true );ERRORR( "Failed to get entities in root_set.", err );
entity_groups.push_back( entities );
// Call do_normalization() to continue common normalization processing
err = do_normalization( norm_tag, entity_sets, entity_groups, integ_type, num_integ_pts );ERRORR( "Failure in do_normalization().", err );
// SLAVE END ****************************************************************
return err;
}
| ErrorCode moab::Coupler::normalize_subset | ( | EntityHandle | root_set, |
| const char * | norm_tag, | ||
| const char ** | tag_names, | ||
| int | num_tags, | ||
| const char ** | tag_values, | ||
| Coupler::IntegType | integ_type, | ||
| int | num_integ_pts | ||
| ) |
Definition at line 1156 of file Coupler.cpp.
References ErrorCode, ERRORR, MB_TAG_ANY, MB_TYPE_DOUBLE, mbImpl, t, and moab::Interface::tag_get_handle().
Referenced by main().
{
moab::ErrorCode err;
std::vector< Tag > tag_handles;
// Lookup tag handles from tag names
for( int t = 0; t < num_tags; t++ )
{
// get tag handle & size
Tag th;
err = mbImpl->tag_get_handle( tag_names[t], 1, moab::MB_TYPE_DOUBLE, th, moab::MB_TAG_ANY );ERRORR( "Failed to get tag handle.", err );
tag_handles.push_back( th );
}
return normalize_subset( root_set, norm_tag, &tag_handles[0], num_tags, tag_values, integ_type, num_integ_pts );
}
| ErrorCode moab::Coupler::normalize_subset | ( | EntityHandle | root_set, |
| const char * | norm_tag, | ||
| Tag * | tag_handles, | ||
| int | num_tags, | ||
| const char ** | tag_values, | ||
| Coupler::IntegType | integ_type, | ||
| int | num_integ_pts | ||
| ) |
Definition at line 1179 of file Coupler.cpp.
References do_normalization(), ErrorCode, ERRORR, and get_matching_entities().
{
ErrorCode err;
// SLAVE START ****************************************************************
// Search for entities based on tag_handles and tag_values
std::vector< std::vector< EntityHandle > > entity_sets;
std::vector< std::vector< EntityHandle > > entity_groups;
err = get_matching_entities( root_set, tag_handles, tag_values, num_tags, &entity_sets, &entity_groups );ERRORR( "Failed to get matching entities.", err );
// Call do_normalization() to continue common normalization processing
err = do_normalization( norm_tag, entity_sets, entity_groups, integ_type, num_integ_pts );ERRORR( "Failure in do_normalization().", err );
// SLAVE END ****************************************************************
return err;
}
| int moab::Coupler::num_its | ( | ) | const [inline] |
| void moab::Coupler::set_spherical | ( | bool | arg1 = true | ) | [inline] |
| const Range& moab::Coupler::target_ents | ( | ) | const [inline] |
| ErrorCode moab::Coupler::test_local_box | ( | double * | xyz, |
| int | from_proc, | ||
| int | remote_index, | ||
| int | index, | ||
| bool & | point_located, | ||
| double | rel_eps = 0.0, |
||
| double | abs_eps = 0.0, |
||
| TupleList * | tl = NULL |
||
| ) | [private] |
Definition at line 564 of file Coupler.cpp.
References box(), moab::BoundBox::diagonal_length(), moab::TupleList::disableWriteAccess(), moab::TupleList::enableWriteAccess(), entities, ErrorCode, moab::Tree::get_bounding_box(), moab::TupleList::get_max(), moab::TupleList::get_n(), moab::TupleList::get_writeEnabled(), moab::TupleList::inc_n(), localRoot, mappedPts, MB_SUCCESS, myTree, nat_param(), moab::TupleList::resize(), moab::TupleList::vi_wr, moab::TupleList::vr_wr, and moab::TupleList::vul_wr.
Referenced by locate_points().
{
std::vector< EntityHandle > entities;
std::vector< CartVect > nat_coords;
bool canWrite = false;
if( tl )
{
canWrite = tl->get_writeEnabled();
if( !canWrite )
{
tl->enableWriteAccess();
canWrite = true;
}
}
if( rel_eps && !abs_eps )
{
// Relative epsilon given, translate to absolute epsilon using box dimensions
BoundBox box;
myTree->get_bounding_box( box, &localRoot );
abs_eps = rel_eps * box.diagonal_length();
}
ErrorCode result = nat_param( xyz, entities, nat_coords, abs_eps );
if( MB_SUCCESS != result ) return result;
// If we didn't find any ents and we're looking locally, nothing more to do
if( entities.empty() )
{
if( tl->get_n() == tl->get_max() ) tl->resize( std::max( 10.0, 1.5 * tl->get_max() ) );
tl->vi_wr[3 * tl->get_n()] = from_proc;
tl->vi_wr[3 * tl->get_n() + 1] = remote_index;
tl->vi_wr[3 * tl->get_n() + 2] = -1;
tl->inc_n();
point_located = false;
return MB_SUCCESS;
}
// Grow if we know we'll exceed size
if( mappedPts->get_n() + entities.size() >= mappedPts->get_max() )
mappedPts->resize( std::max( 10.0, 1.5 * mappedPts->get_max() ) );
std::vector< EntityHandle >::iterator eit = entities.begin();
std::vector< CartVect >::iterator ncit = nat_coords.begin();
mappedPts->enableWriteAccess();
for( ; eit != entities.end(); ++eit, ++ncit )
{
// Store in tuple mappedPts
mappedPts->vr_wr[3 * mappedPts->get_n()] = ( *ncit )[0];
mappedPts->vr_wr[3 * mappedPts->get_n() + 1] = ( *ncit )[1];
mappedPts->vr_wr[3 * mappedPts->get_n() + 2] = ( *ncit )[2];
mappedPts->vul_wr[mappedPts->get_n()] = *eit;
mappedPts->inc_n();
// Also store local point, mapped point indices
if( tl->get_n() == tl->get_max() ) tl->resize( std::max( 10.0, 1.5 * tl->get_max() ) );
// Store in tuple source_pts
tl->vi_wr[3 * tl->get_n()] = from_proc;
tl->vi_wr[3 * tl->get_n() + 1] = remote_index;
tl->vi_wr[3 * tl->get_n() + 2] = mappedPts->get_n() - 1;
tl->inc_n();
}
point_located = true;
if( tl && !canWrite ) tl->disableWriteAccess();
return MB_SUCCESS;
}
int moab::Coupler::_ntot [private] |
Definition at line 559 of file Coupler.hpp.
Referenced by get_gl_points_on_elements(), initialize_spectral_elements(), and interpolate().
void* moab::Coupler::_spectralSource [private] |
Definition at line 556 of file Coupler.hpp.
Referenced by Coupler(), initialize_spectral_elements(), interp_field(), interpolate(), nat_param(), and ~Coupler().
void* moab::Coupler::_spectralTarget [private] |
Definition at line 557 of file Coupler.hpp.
Referenced by Coupler(), initialize_spectral_elements(), and ~Coupler().
moab::Tag moab::Coupler::_xm1Tag [private] |
Definition at line 558 of file Coupler.hpp.
Referenced by get_gl_points_on_elements(), initialize_spectral_elements(), and nat_param().
moab::Tag moab::Coupler::_ym1Tag [private] |
Definition at line 558 of file Coupler.hpp.
Referenced by get_gl_points_on_elements(), initialize_spectral_elements(), and nat_param().
moab::Tag moab::Coupler::_zm1Tag [private] |
Definition at line 558 of file Coupler.hpp.
Referenced by get_gl_points_on_elements(), initialize_spectral_elements(), and nat_param().
std::vector< double > moab::Coupler::allBoxes [private] |
Definition at line 510 of file Coupler.hpp.
Referenced by all_boxes(), initialize_tree(), and locate_points().
EntityHandle moab::Coupler::localRoot [private] |
Definition at line 506 of file Coupler.hpp.
Referenced by initialize_tree(), local_root(), nat_param(), and test_local_box().
TupleList* moab::Coupler::mappedPts [private] |
Definition at line 534 of file Coupler.hpp.
Referenced by Coupler(), interpolate(), locate_points(), mapped_pts(), test_local_box(), and ~Coupler().
int moab::Coupler::max_dim [private] |
Definition at line 551 of file Coupler.hpp.
Referenced by initialize_tree(), and nat_param().
Interface* moab::Coupler::mbImpl [private] |
Definition at line 498 of file Coupler.hpp.
Referenced by apply_group_norm_factor(), constant_interp(), create_tuples(), get_gl_points_on_elements(), get_group_integ_vals(), get_matching_entities(), initialize_spectral_elements(), initialize_tree(), interp_field(), interpolate(), locate_points(), mb_impl(), nat_param(), normalize_mesh(), and normalize_subset().
int moab::Coupler::myId [private] |
Definition at line 518 of file Coupler.hpp.
Referenced by my_id().
ParallelComm* moab::Coupler::myPc [private] |
Definition at line 514 of file Coupler.hpp.
Referenced by do_normalization(), get_matching_entities(), initialize_tree(), interpolate(), locate_points(), and my_pc().
Range moab::Coupler::myRange [private] |
Definition at line 522 of file Coupler.hpp.
Referenced by Coupler(), initialize_tree(), and my_range().
AdaptiveKDTree* moab::Coupler::myTree [private] |
Definition at line 502 of file Coupler.hpp.
Referenced by Coupler(), initialize_tree(), my_tree(), nat_param(), test_local_box(), and ~Coupler().
int moab::Coupler::numIts [private] |
Definition at line 548 of file Coupler.hpp.
Referenced by initialize_tree(), and num_its().
bool moab::Coupler::spherical [private] |
Definition at line 562 of file Coupler.hpp.
Referenced by initialize_tree(), nat_param(), and set_spherical().
Range moab::Coupler::targetEnts [private] |
Definition at line 526 of file Coupler.hpp.
Referenced by locate_points(), and target_ents().
TupleList* moab::Coupler::targetPts [private] |
Definition at line 543 of file Coupler.hpp.
Referenced by Coupler(), interpolate(), locate_points(), and ~Coupler().
 1.7.6.1
1.7.6.1