|
MOAB: Mesh Oriented datABase
(version 5.4.1)
|
|
MOAB: Mesh Oriented datABase
(version 5.4.1)
|
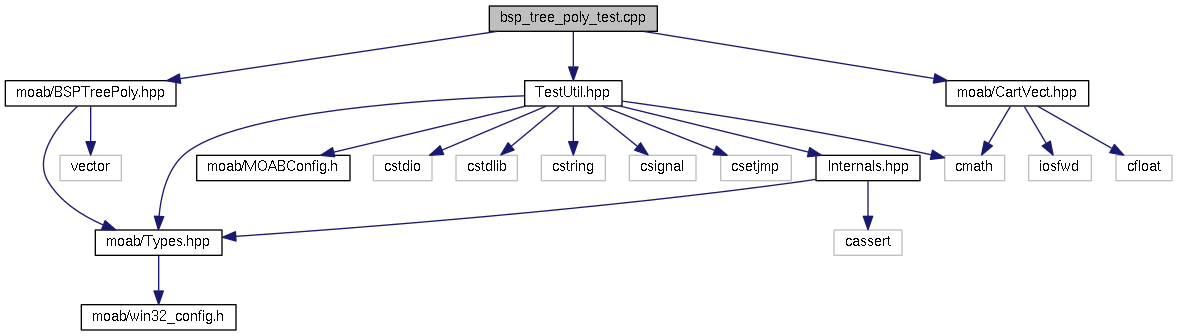
 Include dependency graph for bsp_tree_poly_test.cpp:
Include dependency graph for bsp_tree_poly_test.cpp:Go to the source code of this file.
Functions | |
| void | test_construct_from_hex () |
| void | test_cut_with_plane () |
| void | test_volume () |
| int | main () |
| static void | get_corners (CartVect corners[8]) |
| const BSPTreePoly::Face * | find_face (const BSPTreePoly &poly, const CartVect *coords, int num_corners, const int *face_indices=0) |
Variables | |
| const int | hex_faces [6][4] |
| const BSPTreePoly::Face* find_face | ( | const BSPTreePoly & | poly, |
| const CartVect * | coords, | ||
| int | num_corners, | ||
| const int * | face_indices = 0 |
||
| ) |
Definition at line 35 of file bsp_tree_poly_test.cpp.
References moab::BSPTreePoly::get_faces(), moab::BSPTreePoly::get_vertices(), and length_squared().
Referenced by test_construct_from_hex(), and test_cut_with_plane().
{
std::vector< const BSPTreePoly::Face* >::iterator i;
std::vector< const BSPTreePoly::Face* > faces;
std::vector< CartVect > corners;
poly.get_faces( faces );
for( i = faces.begin(); i != faces.end(); ++i )
{
corners.clear();
poly.get_vertices( *i, corners );
if( corners.size() != (unsigned)num_corners ) continue;
int j;
for( j = 0; j < num_corners; ++j )
{
int corner = face_indices ? face_indices[j] : j;
if( ( coords[corner] - corners.front() ).length_squared() < 1e-12 ) break;
}
if( j == num_corners ) continue;
int k;
for( k = 1; k < num_corners; ++k )
{
int corner = face_indices ? face_indices[( j + k ) % num_corners] : ( j + k ) % num_corners;
if( ( coords[corner] - corners[k] ).length_squared() > 1e-12 ) break;
}
if( k == num_corners ) return *i;
}
return 0;
}
| static void get_corners | ( | CartVect | corners[8] | ) | [static] |
Definition at line 23 of file bsp_tree_poly_test.cpp.
Referenced by test_construct_from_hex(), test_cut_with_plane(), and test_volume().
| int main | ( | ) |
Definition at line 11 of file bsp_tree_poly_test.cpp.
References error_count, RUN_TEST, test_construct_from_hex(), test_cut_with_plane(), and test_volume().
{
int error_count = 0;
error_count += RUN_TEST( test_construct_from_hex );
error_count += RUN_TEST( test_cut_with_plane );
error_count += RUN_TEST( test_volume );
return error_count;
}
| void test_construct_from_hex | ( | ) |
Definition at line 70 of file bsp_tree_poly_test.cpp.
References CHECK, CHECK_EQUAL, find_face(), get_corners(), moab::BSPTreePoly::get_faces(), hex_faces, moab::BSPTreePoly::is_valid(), and moab::BSPTreePoly::reset_debug_ids().
Referenced by main().
{
BSPTreePoly::reset_debug_ids();
CartVect corners[8];
get_corners( corners );
BSPTreePoly poly( corners );
CHECK( poly.is_valid() );
std::vector< const BSPTreePoly::Face* > faces;
poly.get_faces( faces );
CHECK_EQUAL( (size_t)6, faces.size() );
CHECK( 0 != find_face( poly, corners, 4, hex_faces[0] ) );
CHECK( 0 != find_face( poly, corners, 4, hex_faces[1] ) );
CHECK( 0 != find_face( poly, corners, 4, hex_faces[2] ) );
CHECK( 0 != find_face( poly, corners, 4, hex_faces[3] ) );
CHECK( 0 != find_face( poly, corners, 4, hex_faces[4] ) );
CHECK( 0 != find_face( poly, corners, 4, hex_faces[5] ) );
}
| void test_cut_with_plane | ( | ) |
Definition at line 91 of file bsp_tree_poly_test.cpp.
References CHECK, CHECK_EQUAL, moab::BSPTreePoly::cut_polyhedron(), find_face(), get_corners(), moab::BSPTreePoly::get_faces(), hex_faces, moab::BSPTreePoly::is_valid(), moab::BSPTreePoly::reset_debug_ids(), and moab::BSPTreePoly::set().
Referenced by main().
{
// create a hexahedron
BSPTreePoly::reset_debug_ids();
CartVect corners[8];
get_corners( corners );
BSPTreePoly poly( corners );
CHECK( poly.is_valid() );
// check that a plane entirely above the
// polyhedron (coincident with one face)
// doesn't modify the polyhedron
bool r = poly.cut_polyhedron( CartVect( 0, 0, 1 ), -2 );
CHECK( !r );
CHECK( poly.is_valid() );
// cut in half with Z=1 plane
r = poly.cut_polyhedron( CartVect( 0, 0, 1 ), -1 );
CHECK( r );
CHECK( poly.is_valid() );
for( int i = 0; i < 8; ++i )
{
if( fabs( corners[i][2] - 2 ) < 1e-6 ) corners[i][2] = 1;
if( fabs( corners[i][0] - 4 ) < 1e-6 ) corners[i][0] = 5;
}
std::vector< const BSPTreePoly::Face* > faces;
poly.get_faces( faces );
CHECK_EQUAL( (size_t)6, faces.size() );
CHECK( 0 != find_face( poly, corners, 4, hex_faces[0] ) );
CHECK( 0 != find_face( poly, corners, 4, hex_faces[1] ) );
CHECK( 0 != find_face( poly, corners, 4, hex_faces[2] ) );
CHECK( 0 != find_face( poly, corners, 4, hex_faces[3] ) );
CHECK( 0 != find_face( poly, corners, 4, hex_faces[4] ) );
CHECK( 0 != find_face( poly, corners, 4, hex_faces[5] ) );
// create a hexahedron
BSPTreePoly::reset_debug_ids();
get_corners( corners );
poly.set( corners );
CHECK( poly.is_valid() );
// cut off two corners using X=5 plane
r = poly.cut_polyhedron( CartVect( 1, 0, 0 ), -5 );
CHECK( r );
CHECK( poly.is_valid() );
faces.clear();
poly.get_faces( faces );
CHECK_EQUAL( (size_t)7, faces.size() );
CartVect new_vtx1( 5, 1, 1 );
CartVect new_vtx2( 5, 1, 0 );
CartVect new_vtx3( 5, 3, 0 );
CartVect new_vtx4( 5, 3, 1 );
CartVect face1[5] = { corners[0], new_vtx2, new_vtx1, corners[5], corners[4] };
CartVect face2[4] = { new_vtx1, new_vtx4, corners[6], corners[5] };
CartVect face3[5] = { new_vtx4, new_vtx3, corners[3], corners[7], corners[6] };
CartVect face5[4] = { corners[3], new_vtx3, new_vtx2, corners[0] };
CartVect face7[4] = { new_vtx1, new_vtx2, new_vtx3, new_vtx4 };
CHECK( 0 != find_face( poly, face1, 5 ) );
CHECK( 0 != find_face( poly, face2, 4 ) );
CHECK( 0 != find_face( poly, face3, 5 ) );
CHECK( 0 != find_face( poly, corners, 4, hex_faces[3] ) );
CHECK( 0 != find_face( poly, face5, 4 ) );
CHECK( 0 != find_face( poly, corners, 4, hex_faces[5] ) );
CHECK( 0 != find_face( poly, face7, 4 ) );
}
| void test_volume | ( | ) |
Definition at line 163 of file bsp_tree_poly_test.cpp.
References CHECK, CHECK_REAL_EQUAL, get_corners(), moab::BSPTreePoly::is_valid(), and moab::BSPTreePoly::volume().
Referenced by main().
{
CartVect corners[8];
get_corners( corners );
BSPTreePoly poly( corners );
CHECK( poly.is_valid() );
CHECK_REAL_EQUAL( 16.0, poly.volume(), 1e-6 );
}
| const int hex_faces[6][4] |
{ { 0, 1, 5, 4 }, { 1, 2, 6, 5 }, { 2, 3, 7, 6 },
{ 3, 0, 4, 7 }, { 3, 2, 1, 0 }, { 4, 5, 6, 7 } }
Definition at line 20 of file bsp_tree_poly_test.cpp.
Referenced by test_construct_from_hex(), and test_cut_with_plane().
 1.7.6.1
1.7.6.1