|
MOAB: Mesh Oriented datABase
(version 5.4.1)
|
|
MOAB: Mesh Oriented datABase
(version 5.4.1)
|
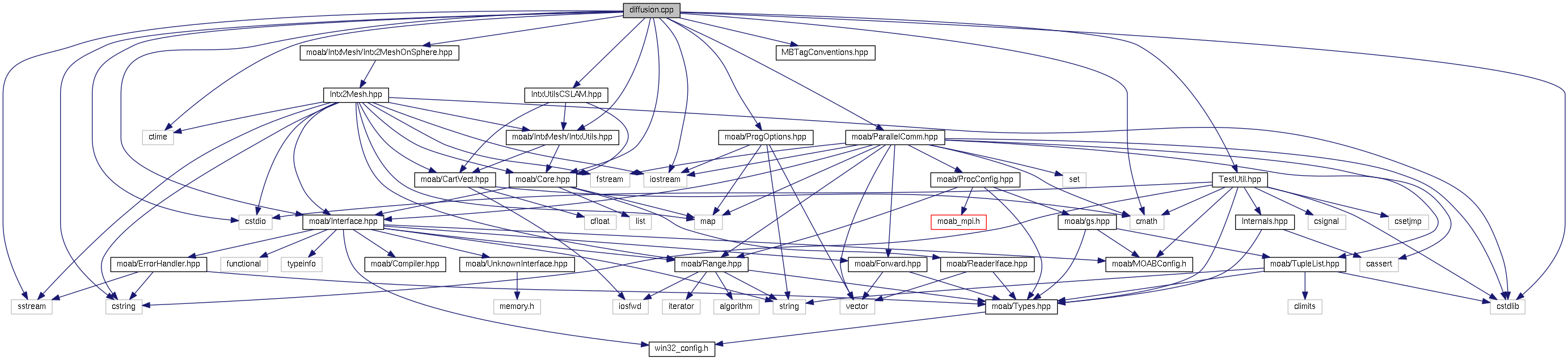
#include <iostream>#include <sstream>#include <ctime>#include <cstdlib>#include <cstdio>#include <cstring>#include <cmath>#include "moab/Core.hpp"#include "moab/Interface.hpp"#include "moab/IntxMesh/Intx2MeshOnSphere.hpp"#include "moab/ProgOptions.hpp"#include "MBTagConventions.hpp"#include "moab/ParallelComm.hpp"#include "moab/IntxMesh/IntxUtils.hpp"#include "IntxUtilsCSLAM.hpp"#include "TestUtil.hpp" Include dependency graph for diffusion.cpp:
Include dependency graph for diffusion.cpp:Go to the source code of this file.
Functions | |
| ErrorCode | add_field_value (Interface *mb, EntityHandle euler_set, int rank, Tag &tagTracer, Tag &tagElem, Tag &tagArea) |
| ErrorCode | compute_velocity_case1 (Interface *mb, EntityHandle euler_set, Tag &tagh, int rank, int tStep) |
| ErrorCode | compute_tracer_case1 (Interface *mb, Intx2MeshOnSphere &worker, EntityHandle euler_set, EntityHandle lagr_set, EntityHandle out_set, Tag &tagElem, Tag &tagArea, int rank, int tStep, Range &connecVerts) |
| int | main (int argc, char **argv) |
Variables | |
| const char | BRIEF_DESC [] = "Simulate a transport problem in a semi-Lagrangian formulation\n" |
| std::ostringstream | LONG_DESC |
| double | gtol = 1.e-9 |
| double | radius = 1. |
| int | numSteps = 3 |
| double | T = 1 |
| int | case_number = 1 |
| bool | writeFiles = false |
| bool | parallelWrite = false |
| bool | velocity = false |
| int | field_type = 1 |
| ErrorCode add_field_value | ( | Interface * | mb, |
| EntityHandle | euler_set, | ||
| int | rank, | ||
| Tag & | tagTracer, | ||
| Tag & | tagElem, | ||
| Tag & | tagArea | ||
| ) |
Definition at line 61 of file diffusion.cpp.
References moab::IntxAreaUtils::area_spherical_polygon(), moab::Range::begin(), moab::IntxUtils::cart_to_spherical(), moab::Range::end(), ErrorCode, field_type, moab::Interface::get_connectivity(), moab::Interface::get_coords(), moab::Interface::get_entities_by_dimension(), moab::IntxUtils::SphereCoords::lat, moab::IntxUtils::SphereCoords::lon, MB_CHK_ERR, MB_SUCCESS, MPI_COMM_WORLD, IntxUtilsCSLAM::quasi_smooth_field(), moab::IntxUtils::SphereCoords::R, radius, moab::Range::size(), IntxUtilsCSLAM::slotted_cylinder_field(), IntxUtilsCSLAM::smooth_field(), moab::IntxUtils::spherical_to_cart(), moab::Interface::tag_get_data(), and moab::Interface::tag_iterate().
{
/*
* get all plys first, then vertices, then move them on the surface of the sphere
* radius is 1., most of the time
*
*/
Range polygons;
ErrorCode rval = mb->get_entities_by_dimension( euler_set, 2, polygons );
if( MB_SUCCESS != rval ) return rval;
Range connecVerts;
rval = mb->get_connectivity( polygons, connecVerts );
if( MB_SUCCESS != rval ) return rval;
void* data; // pointer to the LOC in memory, for each vertex
int count;
rval = mb->tag_iterate( tagTracer, connecVerts.begin(), connecVerts.end(), count, data );MB_CHK_ERR( rval );
// here we are checking contiguity
assert( count == (int)connecVerts.size() );
double* ptr_DP = (double*)data;
// lambda is for longitude, theta for latitude
// param will be: (la1, te1), (la2, te2), b, c; hmax=1, r=1/2
// nondivergent flow, page 5, case 1, (la1, te1) = (M_PI, M_PI/3)
// (la2, te2) = (M_PI, -M_PI/3)
// la1, te1 la2 te2 b c hmax r
if( field_type == 1 ) // quasi smooth
{
double params[] = { M_PI, M_PI / 3, M_PI, -M_PI / 3, 0.1, 0.9, 1., 0.5 };
for( Range::iterator vit = connecVerts.begin(); vit != connecVerts.end(); ++vit )
{
EntityHandle oldV = *vit;
CartVect posi;
rval = mb->get_coords( &oldV, 1, &( posi[0] ) );MB_CHK_ERR( rval );
moab::IntxUtils::SphereCoords sphCoord = moab::IntxUtils::cart_to_spherical( posi );
ptr_DP[0] = IntxUtilsCSLAM::quasi_smooth_field( sphCoord.lon, sphCoord.lat, params );
;
ptr_DP++; // increment to the next node
}
}
else if( 2 == field_type ) // smooth
{
CartVect p1, p2;
moab::IntxUtils::SphereCoords spr;
spr.R = 1;
spr.lat = M_PI / 3;
spr.lon = M_PI;
p1 = moab::IntxUtils::spherical_to_cart( spr );
spr.lat = -M_PI / 3;
p2 = moab::IntxUtils::spherical_to_cart( spr );
// x1, y1, z1, x2, y2, z2, h_max, b0
double params[] = { p1[0], p1[1], p1[2], p2[0], p2[1], p2[2], 1, 5. };
for( Range::iterator vit = connecVerts.begin(); vit != connecVerts.end(); ++vit )
{
EntityHandle oldV = *vit;
CartVect posi;
rval = mb->get_coords( &oldV, 1, &( posi[0] ) );MB_CHK_ERR( rval );
moab::IntxUtils::SphereCoords sphCoord = moab::IntxUtils::cart_to_spherical( posi );
ptr_DP[0] = IntxUtilsCSLAM::smooth_field( sphCoord.lon, sphCoord.lat, params );
;
ptr_DP++; // increment to the next node
}
}
else if( 3 == field_type ) // slotted
{
// la1, te1, la2, te2, b, c, r
double params[] = { M_PI, M_PI / 3, M_PI, -M_PI / 3, 0.1, 0.9, 0.5 }; // no h_max
for( Range::iterator vit = connecVerts.begin(); vit != connecVerts.end(); ++vit )
{
EntityHandle oldV = *vit;
CartVect posi;
rval = mb->get_coords( &oldV, 1, &( posi[0] ) );MB_CHK_ERR( rval );
moab::IntxUtils::SphereCoords sphCoord = moab::IntxUtils::cart_to_spherical( posi );
ptr_DP[0] = IntxUtilsCSLAM::slotted_cylinder_field( sphCoord.lon, sphCoord.lat, params );
;
ptr_DP++; // increment to the next node
}
}
// add average value for quad/polygon (average corners)
// do some averages
Range::iterator iter = polygons.begin();
double local_mass = 0.; // this is total mass on one proc
while( iter != polygons.end() )
{
rval = mb->tag_iterate( tagElem, iter, polygons.end(), count, data );MB_CHK_ERR( rval );
double* ptr = (double*)data;
rval = mb->tag_iterate( tagArea, iter, polygons.end(), count, data );MB_CHK_ERR( rval );
double* ptrArea = (double*)data;
for( int i = 0; i < count; i++, ++iter, ptr++, ptrArea++ )
{
const moab::EntityHandle* conn = NULL;
int num_nodes = 0;
rval = mb->get_connectivity( *iter, conn, num_nodes );MB_CHK_ERR( rval );
if( num_nodes == 0 ) return MB_FAILURE;
std::vector< double > nodeVals( num_nodes );
double average = 0.;
rval = mb->tag_get_data( tagTracer, conn, num_nodes, &nodeVals[0] );MB_CHK_ERR( rval );
for( int j = 0; j < num_nodes; j++ )
average += nodeVals[j];
average /= num_nodes;
*ptr = average;
// now get area
std::vector< double > coords;
coords.resize( 3 * num_nodes );
rval = mb->get_coords( conn, num_nodes, &coords[0] );MB_CHK_ERR( rval );
moab::IntxAreaUtils sphAreaUtils;
*ptrArea = sphAreaUtils.area_spherical_polygon( &coords[0], num_nodes, radius );
// we should have used some
// total mass:
local_mass += *ptrArea * average;
}
}
double total_mass = 0.;
int mpi_err = MPI_Reduce( &local_mass, &total_mass, 1, MPI_DOUBLE, MPI_SUM, 0, MPI_COMM_WORLD );
if( MPI_SUCCESS != mpi_err ) return MB_FAILURE;
if( rank == 0 ) std::cout << "initial total mass:" << total_mass << "\n";
// now we can delete the tags? not yet
return MB_SUCCESS;
}
| ErrorCode compute_tracer_case1 | ( | Interface * | mb, |
| Intx2MeshOnSphere & | worker, | ||
| EntityHandle | euler_set, | ||
| EntityHandle | lagr_set, | ||
| EntityHandle | out_set, | ||
| Tag & | tagElem, | ||
| Tag & | tagArea, | ||
| int | rank, | ||
| int | tStep, | ||
| Range & | connecVerts | ||
| ) |
Definition at line 242 of file diffusion.cpp.
References moab::Range::begin(), moab::Interface::clear_meshset(), CORRTAGNAME, moab::Intx2Mesh::create_departure_mesh_3rd_alg(), moab::Interface::delete_entities(), delta_t, IntxUtilsCSLAM::departure_point_case1(), moab::dum, moab::Range::end(), ErrorCode, moab::Interface::get_connectivity(), moab::Interface::get_coords(), moab::Interface::get_entities_by_dimension(), moab::Intx2Mesh::intersect_meshes(), MB_CHK_ERR, MB_TAG_DENSE, MB_TYPE_HANDLE, numSteps, parallelWrite, radius, moab::Interface::set_coords(), moab::subtract(), t, T, moab::Interface::tag_get_data(), moab::Interface::tag_get_handle(), moab::Intx2MeshOnSphere::update_tracer_data(), moab::Interface::write_file(), and writeFiles.
Referenced by main().
{
ErrorCode rval;
EntityHandle dum = 0;
Tag corrTag;
rval = mb->tag_get_handle( CORRTAGNAME, 1, MB_TYPE_HANDLE, corrTag, MB_TAG_DENSE, &dum );MB_CHK_ERR( rval );
double t = tStep * T / numSteps; // numSteps is global; so is T
double delta_t = T / numSteps; // this is global too, actually
Range polys;
rval = mb->get_entities_by_dimension( euler_set, 2, polys );MB_CHK_ERR( rval );
// change coordinates of lagr mesh vertices
for( Range::iterator vit = connecVerts.begin(); vit != connecVerts.end(); ++vit )
{
EntityHandle oldV = *vit;
CartVect posi;
rval = mb->get_coords( &oldV, 1, &( posi[0] ) );MB_CHK_ERR( rval );
// Intx utils, case 1
CartVect newPos;
IntxUtilsCSLAM::departure_point_case1( posi, t, delta_t, newPos );
newPos = radius * newPos; // do we need this? the radius should be 1
EntityHandle new_vert;
rval = mb->tag_get_data( corrTag, &oldV, 1, &new_vert );MB_CHK_ERR( rval );
// set the new position for the new vertex
rval = mb->set_coords( &new_vert, 1, &( newPos[0] ) );MB_CHK_ERR( rval );
}
// if in parallel, we have to move some elements to another proc, and receive other cells
// from other procs
// lagr and euler are preserved
EntityHandle covering_set;
rval = worker.create_departure_mesh_3rd_alg( lagr_set, covering_set );MB_CHK_ERR( rval );
if( writeFiles ) // so if write
{
std::stringstream departureMesh;
departureMesh << "Departure" << rank << "_" << tStep << ".vtk";
rval = mb->write_file( departureMesh.str().c_str(), 0, 0, &lagr_set, 1 );MB_CHK_ERR( rval );
std::stringstream newTracer;
newTracer << "Tracer" << rank << "_" << tStep << ".vtk";
rval = mb->write_file( newTracer.str().c_str(), 0, 0, &euler_set, 1 );MB_CHK_ERR( rval );
std::stringstream lagr_cover;
lagr_cover << "Cover" << rank << "_" << tStep << ".vtk";
rval = mb->write_file( lagr_cover.str().c_str(), 0, 0, &covering_set, 1 );MB_CHK_ERR( rval );
}
// so we have now the departure at the previous time
// intersect the 2 meshes (what about some checking of convexity?) for sufficient
// small dt, it is not an issue;
rval = worker.intersect_meshes( covering_set, euler_set, out_set );MB_CHK_ERR( rval );
if( writeFiles ) // so if write
{
std::stringstream intx_mesh;
intx_mesh << "Intx" << rank << "_" << tStep << ".vtk";
rval = mb->write_file( intx_mesh.str().c_str(), 0, 0, &out_set, 1 );MB_CHK_ERR( rval );
}
// serially: lagr is the same order as euler;
// we need to update now the tracer information on each element, based on
// initial value and areas of each resulting polygons
if( parallelWrite && tStep == 1 )
{
std::stringstream resTrace;
resTrace << "Tracer"
<< "_" << tStep - 1 << ".h5m";
rval = mb->write_file( resTrace.str().c_str(), 0, "PARALLEL=WRITE_PART", &euler_set, 1, &tagElem, 1 );MB_CHK_ERR( rval );
}
rval = worker.update_tracer_data( out_set, tagElem, tagArea );MB_CHK_ERR( rval );
if( parallelWrite )
{
std::stringstream resTrace;
resTrace << "Tracer"
<< "_" << tStep << ".h5m";
rval = mb->write_file( resTrace.str().c_str(), 0, "PARALLEL=WRITE_PART", &euler_set, 1, &tagElem, 1 );
}
if( writeFiles ) // so if write
{
std::stringstream newIntx;
newIntx << "newIntx" << rank << "_" << tStep << ".vtk";
rval = mb->write_file( newIntx.str().c_str(), 0, 0, &out_set, 1 );MB_CHK_ERR( rval );
}
// delete now the polygons and the elements of out_set
// also, all verts that are not in euler set or lagr_set
Range allVerts;
rval = mb->get_entities_by_dimension( 0, 0, allVerts );MB_CHK_ERR( rval );
Range allElems;
rval = mb->get_entities_by_dimension( 0, 2, allElems );MB_CHK_ERR( rval );
// add to polys range the lagr polys
// do not delete lagr set either, with its vertices
rval = mb->get_entities_by_dimension( lagr_set, 2, polys );MB_CHK_ERR( rval );
// add to the connecVerts range all verts, from all initial polys
Range vertsToStay;
rval = mb->get_connectivity( polys, vertsToStay );MB_CHK_ERR( rval );
Range todeleteVerts = subtract( allVerts, vertsToStay );
Range todeleteElem = subtract( allElems, polys );
// empty the out mesh set
rval = mb->clear_meshset( &out_set, 1 );MB_CHK_ERR( rval );
rval = mb->delete_entities( todeleteElem );MB_CHK_ERR( rval );
rval = mb->delete_entities( todeleteVerts );MB_CHK_ERR( rval );
if( rank == 0 ) std::cout << " step: " << tStep << "\n";
return rval;
}
| ErrorCode compute_velocity_case1 | ( | Interface * | mb, |
| EntityHandle | euler_set, | ||
| Tag & | tagh, | ||
| int | rank, | ||
| int | tStep | ||
| ) |
Definition at line 199 of file diffusion.cpp.
References moab::Range::begin(), moab::Range::end(), ErrorCode, moab::Interface::get_connectivity(), moab::Interface::get_coords(), moab::Interface::get_entities_by_dimension(), MB_CHK_ERR, MB_SUCCESS, numSteps, moab::Range::size(), t, T, moab::Interface::tag_iterate(), IntxUtilsCSLAM::velocity_case1(), and moab::Interface::write_file().
Referenced by main().
{
Range polygons;
ErrorCode rval = mb->get_entities_by_dimension( euler_set, 2, polygons );
if( MB_SUCCESS != rval ) return rval;
Range connecVerts;
rval = mb->get_connectivity( polygons, connecVerts );
if( MB_SUCCESS != rval ) return rval;
void* data; // pointer to the velo in memory, for each vertex
int count;
rval = mb->tag_iterate( tagh, connecVerts.begin(), connecVerts.end(), count, data );MB_CHK_ERR( rval );
// here we are checking contiguity
assert( count == (int)connecVerts.size() );
double* ptr_velo = (double*)data;
// lambda is for longitude, theta for latitude
for( Range::iterator vit = connecVerts.begin(); vit != connecVerts.end(); ++vit )
{
EntityHandle oldV = *vit;
CartVect posi;
rval = mb->get_coords( &oldV, 1, &( posi[0] ) );MB_CHK_ERR( rval );
CartVect velo;
double t = T * tStep / numSteps; //
IntxUtilsCSLAM::velocity_case1( posi, t, velo );
ptr_velo[0] = velo[0];
ptr_velo[1] = velo[1];
ptr_velo[2] = velo[2];
// increment to the next node
ptr_velo += 3; // to next velocity
}
std::stringstream velos;
velos << "Tracer" << rank << "_" << tStep << ".vtk";
rval = mb->write_file( velos.str().c_str(), 0, 0, &euler_set, 1, &tagh, 1 );MB_CHK_ERR( rval );
return MB_SUCCESS;
}
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 364 of file diffusion.cpp.
References add_field_value(), ProgOptions::addOpt(), moab::Range::begin(), BRIEF_DESC, moab::ParallelComm::check_all_shared_handles(), compute_tracer_case1(), compute_velocity_case1(), moab::Interface::create_meshset(), IntxUtilsCSLAM::deep_copy_set(), moab::Range::end(), ErrorCode, field_type, moab::Intx2Mesh::FindMaxEdges(), moab::Interface::get_entities_by_dimension(), moab::ParallelComm::get_pcomm(), gtol, input_file, moab::Interface::load_file(), LONG_DESC, mb, MB_CHK_ERR, MB_TAG_CREAT, MB_TAG_DENSE, MB_TYPE_DOUBLE, MESHSET_SET, MPI_COMM_WORLD, numSteps, parallelWrite, moab::ParallelComm::proc_config(), moab::ProcConfig::proc_rank(), radius, rank, moab::Intx2Mesh::set_error_tolerance(), moab::Intx2MeshOnSphere::set_radius_destination_mesh(), moab::Intx2MeshOnSphere::set_radius_source_mesh(), moab::Range::size(), moab::Interface::tag_get_data(), moab::Interface::tag_get_handle(), moab::Interface::tag_iterate(), velocity, and writeFiles.
{
MPI_Init( &argc, &argv );
LONG_DESC << "This program simulates a transport problem on a sphere"
" according to a benchmark from a Nair & Lauritzen paper.\n"
<< "It starts with a partitioned mesh on a sphere, add a tracer, and steps through.\n"
<< "The flow reverses after half time, and it should return to original "
"configuration, if the integration was exact. ";
ProgOptions opts( LONG_DESC.str(), BRIEF_DESC );
// read a homme file, partitioned in 16 so far
std::string fileN = TestDir + "unittest/mbcslam/fine4.h5m";
const char* filename_mesh1 = fileN.c_str();
opts.addOpt< double >( "gtolerance,g", "geometric absolute tolerance (used for point concidence on the sphere)",
>ol );
std::string input_file;
opts.addOpt< std::string >( "input_file,i", "input mesh file, partitioned", &input_file );
std::string extra_read_opts;
opts.addOpt< std::string >( "extra_read_options,O", "extra read options ", &extra_read_opts );
// int field_type;
opts.addOpt< int >( "field_type,f", "field type-- 1: quasi-smooth; 2: smooth; 3: slotted cylinders (non-smooth)",
&field_type );
opts.addOpt< int >( "num_steps,n", "number of steps ", &numSteps );
// bool reorder = false;
opts.addOpt< void >( "write_debug_files,w", "write debugging files during simulation ", &writeFiles );
opts.addOpt< void >( "write_velocity_files,v", "Reorder mesh to group entities by partition", &velocity );
opts.addOpt< void >( "write_result_in_parallel,p", "write tracer result files", ¶llelWrite );
opts.parseCommandLine( argc, argv );
if( !input_file.empty() ) filename_mesh1 = input_file.c_str();
// read in parallel, in the "euler_set", the initial mesh
std::string optsRead = std::string( "PARALLEL=READ_PART;PARTITION=PARALLEL_PARTITION" ) +
std::string( ";PARALLEL_RESOLVE_SHARED_ENTS" ) + extra_read_opts;
Core moab;
Interface& mb = moab;
EntityHandle euler_set;
ErrorCode rval;
rval = mb.create_meshset( MESHSET_SET, euler_set );MB_CHK_ERR( rval );
rval = mb.load_file( filename_mesh1, &euler_set, optsRead.c_str() );MB_CHK_ERR( rval );
ParallelComm* pcomm = ParallelComm::get_pcomm( &mb, 0 );
rval = pcomm->check_all_shared_handles();MB_CHK_ERR( rval );
int rank = pcomm->proc_config().proc_rank();
if( 0 == rank )
{
std::cout << " case 1: use -gtol " << gtol << " -R " << radius << " -input " << filename_mesh1 << " -f "
<< field_type << " numSteps: " << numSteps << "\n";
std::cout << " write debug results: " << ( writeFiles ? "yes" : "no" ) << "\n";
std::cout << " write tracer in parallel: " << ( parallelWrite ? "yes" : "no" ) << "\n";
std::cout << " output velocity: " << ( velocity ? "yes" : "no" ) << "\n";
}
// tagTracer is the value at nodes
Tag tagTracer = 0;
std::string tag_name( "Tracer" );
rval = mb.tag_get_handle( tag_name.c_str(), 1, MB_TYPE_DOUBLE, tagTracer, MB_TAG_DENSE | MB_TAG_CREAT );MB_CHK_ERR( rval );
// tagElem is the average computed at each element, from nodal values
Tag tagElem = 0;
std::string tag_name2( "TracerAverage" );
rval = mb.tag_get_handle( tag_name2.c_str(), 1, MB_TYPE_DOUBLE, tagElem, MB_TAG_DENSE | MB_TAG_CREAT );MB_CHK_ERR( rval );
// area of the euler element is fixed, store it; it is used to recompute the averages at each
// time step
Tag tagArea = 0;
std::string tag_name4( "Area" );
rval = mb.tag_get_handle( tag_name4.c_str(), 1, MB_TYPE_DOUBLE, tagArea, MB_TAG_DENSE | MB_TAG_CREAT );MB_CHK_ERR( rval );
// add a field value, quasi smooth first
rval = add_field_value( &mb, euler_set, rank, tagTracer, tagElem, tagArea );MB_CHK_ERR( rval );
// iniVals are used for 1-norm error computation
Range redEls;
rval = mb.get_entities_by_dimension( euler_set, 2, redEls );MB_CHK_ERR( rval );
std::vector< double > iniVals( redEls.size() );
rval = mb.tag_get_data( tagElem, redEls, &iniVals[0] );MB_CHK_ERR( rval );
Tag tagh = 0;
std::string tag_name3( "Case1" );
rval = mb.tag_get_handle( tag_name3.c_str(), 3, MB_TYPE_DOUBLE, tagh, MB_TAG_DENSE | MB_TAG_CREAT );MB_CHK_ERR( rval );
EntityHandle out_set, lagr_set;
rval = mb.create_meshset( MESHSET_SET, out_set );MB_CHK_ERR( rval );
rval = mb.create_meshset( MESHSET_SET, lagr_set );MB_CHK_ERR( rval );
// copy the initial mesh in the lagrangian set
// initial vertices will be at the same position as euler;
rval = IntxUtilsCSLAM::deep_copy_set( &mb, euler_set, lagr_set );MB_CHK_ERR( rval );
Intx2MeshOnSphere worker( &mb );
worker.set_radius_source_mesh( radius );
worker.set_radius_destination_mesh( radius );
worker.set_error_tolerance( gtol );
worker.set_parallel_comm( pcomm );
rval = worker.FindMaxEdges( lagr_set, euler_set );MB_CHK_ERR( rval );
Range local_verts;
// output also the local_verts
rval = worker.build_processor_euler_boxes( euler_set, local_verts );MB_CHK_ERR( rval );
// these stay fixed for one run
// other things from intersection might need to change, like input blue set (departure set)
// so we need also a method to clean memory
for( int i = 1; i < numSteps + 1; i++ )
{
// time depends on i; t = i*T/numSteps: ( 0, T/numSteps, 2*T/numSteps, ..., T )
// this is really just to create some plots; it is not really needed to proceed
// the compute_tracer_case1 method actually computes the departure point position
if( velocity )
{
rval = compute_velocity_case1( &mb, euler_set, tagh, rank, i );MB_CHK_ERR( rval );
}
// this is to actually compute concentrations at time step i, using the
// current concentrations
rval =
compute_tracer_case1( &mb, worker, euler_set, lagr_set, out_set, tagElem, tagArea, rank, i, local_verts );MB_CHK_ERR( rval );
}
// final vals and 1-norm
Range::iterator iter = redEls.begin();
double norm1 = 0.;
int count = 0;
void* data;
int j = 0; // index in iniVals
while( iter != redEls.end() )
{
rval = mb.tag_iterate( tagElem, iter, redEls.end(), count, data );MB_CHK_ERR( rval );
double* ptrTracer = (double*)data;
rval = mb.tag_iterate( tagArea, iter, redEls.end(), count, data );MB_CHK_ERR( rval );
double* ptrArea = (double*)data;
for( int i = 0; i < count; i++, ++iter, ptrTracer++, ptrArea++, j++ )
{
// double area = *ptrArea;
norm1 += fabs( *ptrTracer - iniVals[j] ) * ( *ptrArea );
}
}
double total_norm1 = 0;
int mpi_err = MPI_Reduce( &norm1, &total_norm1, 1, MPI_DOUBLE, MPI_SUM, 0, MPI_COMM_WORLD );
if( MPI_SUCCESS != mpi_err ) return 1;
if( 0 == rank ) std::cout << " numSteps:" << numSteps << " 1-norm:" << total_norm1 << "\n";
MPI_Finalize();
return 0;
}
| const char BRIEF_DESC[] = "Simulate a transport problem in a semi-Lagrangian formulation\n" |
Definition at line 44 of file diffusion.cpp.
| int case_number = 1 |
Definition at line 54 of file diffusion.cpp.
| int field_type = 1 |
Definition at line 58 of file diffusion.cpp.
| double gtol = 1.e-9 |
Definition at line 49 of file diffusion.cpp.
| std::ostringstream LONG_DESC |
Definition at line 45 of file diffusion.cpp.
| int numSteps = 3 |
Definition at line 52 of file diffusion.cpp.
Referenced by compute_tracer_case1(), compute_velocity_case1(), get_departure_grid(), and main().
| bool parallelWrite = false |
Definition at line 56 of file diffusion.cpp.
Referenced by compute_tracer_case1(), and main().
| double radius = 1. |
Definition at line 50 of file diffusion.cpp.
| double T = 1 |
Definition at line 53 of file diffusion.cpp.
Referenced by moab::SysUtil::byteswap(), moab::SmoothCurve::compute_control_points_on_boundary_edges(), moab::SmoothFace::compute_tangents_for_each_edge(), moab::SmoothCurve::compute_tangents_for_each_edge(), compute_tracer_case1(), compute_velocity_case1(), moab::connectivity_match(), IntxUtilsCSLAM::departure_point_case1(), departure_point_swirl(), departure_point_swirl_rot(), smoab::FaceAdjRegionValues(), smoab::faceIdsPerCell(), get_departure_grid(), get_vartag_data(), smoab::Interface::getDefaultTagVaue(), ProgOptions::getReqArg(), moab::SmoothFace::init_bezier_edge(), itaps_cast(), moab::ScdNCHelper::kji_to_jik(), moab::UcdNCHelper::kji_to_jik_stride(), manufacture_lagrange_mesh_on_sphere(), smoab::detail::ReadSparseTag::multiSetRead(), moab::TagTypeEqual< T >::operator()(), moab::TagTypeLess< T >::operator()(), moab::TagOneTypeEqual< T >::operator()(), moab::TagOneTypeLess< T >::operator()(), moab::TagVarTypeEqual< T >::operator()(), moab::TagVarTypeLess< T >::operator()(), moab::PACK(), parse_value(), parse_values_typed(), moab::permute_this(), moab::common_tree::print_vector(), moab::ParallelComm::reduce(), moab::WriteUtilIface::reorder(), moab::rev_permute_this(), SimpleArray< T >::SimpleArray(), smoab::detail::ReadSparseTag::singleSetRead(), test_reduce_tags(), moab::UNPACK(), IntxUtilsCSLAM::velocity_case1(), moab::WriteVtk::write_data(), moab::WriteVtk::write_tag(), and SimpleArray< T >::~SimpleArray().
| bool velocity = false |
Definition at line 57 of file diffusion.cpp.
Referenced by main().
| bool writeFiles = false |
Definition at line 55 of file diffusion.cpp.
Referenced by compute_tracer_case1(), and main().
 1.7.6.1
1.7.6.1