|
MOAB: Mesh Oriented datABase
(version 5.4.1)
|
|
MOAB: Mesh Oriented datABase
(version 5.4.1)
|
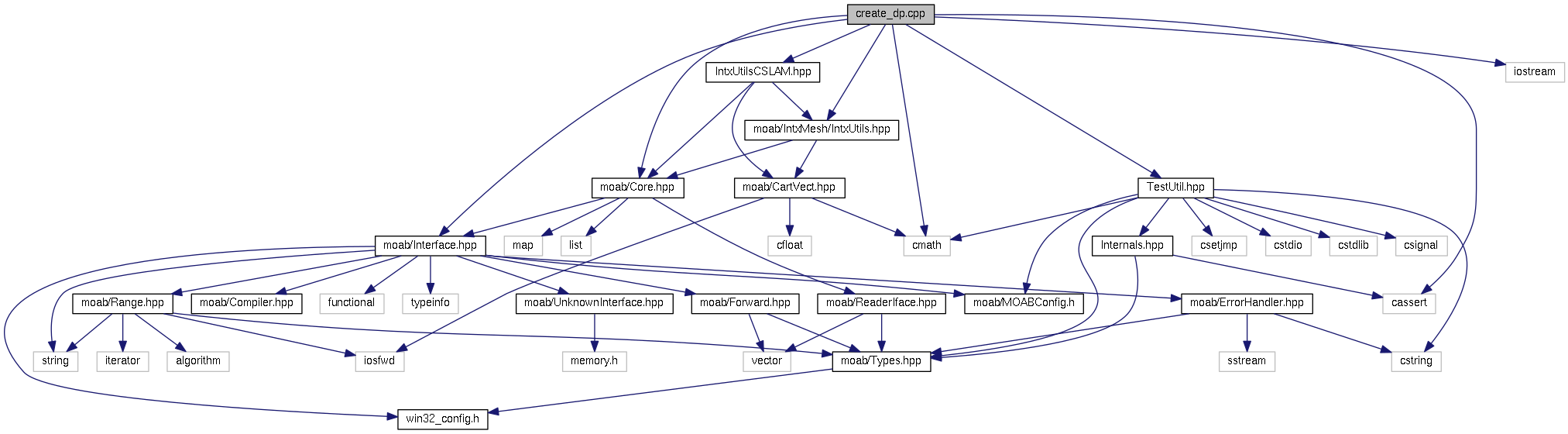
#include "moab/Core.hpp"#include "moab/Interface.hpp"#include <iostream>#include <cmath>#include <cassert>#include "moab/IntxMesh/IntxUtils.hpp"#include "IntxUtilsCSLAM.hpp"#include <TestUtil.hpp> Include dependency graph for create_dp.cpp:
Include dependency graph for create_dp.cpp:Go to the source code of this file.
Functions | |
| ErrorCode | add_field_value (Interface &mb) |
| int | main (int argc, char **argv) |
Variables | |
| double | radius = 1. |
| int | field_type = 1 |
| ErrorCode add_field_value | ( | Interface & | mb | ) |
Definition at line 24 of file create_dp.cpp.
References moab::IntxAreaUtils::area_spherical_polygon(), moab::Range::begin(), moab::IntxUtils::cart_to_spherical(), CHECK_ERR, moab::Range::end(), ErrorCode, field_type, moab::Interface::get_connectivity(), moab::Interface::get_coords(), moab::Interface::get_entities_by_dimension(), moab::IntxUtils::SphereCoords::lat, moab::IntxUtils::SphereCoords::lon, MB_SUCCESS, MB_TAG_CREAT, MB_TAG_DENSE, MB_TYPE_DOUBLE, IntxUtilsCSLAM::quasi_smooth_field(), moab::IntxUtils::SphereCoords::R, radius, moab::Range::size(), IntxUtilsCSLAM::slotted_cylinder_field(), IntxUtilsCSLAM::smooth_field(), moab::IntxUtils::spherical_to_cart(), moab::Interface::tag_get_data(), moab::Interface::tag_get_handle(), and moab::Interface::tag_iterate().
Referenced by main().
{
Tag tagTracer = 0;
std::string tag_name( "Tracer" );
ErrorCode rval = mb.tag_get_handle( tag_name.c_str(), 1, MB_TYPE_DOUBLE, tagTracer, MB_TAG_DENSE | MB_TAG_CREAT );CHECK_ERR( rval );
// tagElem is the average computed at each element, from nodal values
Tag tagElem = 0;
std::string tag_name2( "TracerAverage" );
rval = mb.tag_get_handle( tag_name2.c_str(), 1, MB_TYPE_DOUBLE, tagElem, MB_TAG_DENSE | MB_TAG_CREAT );CHECK_ERR( rval );
Tag tagArea = 0;
std::string tag_name4( "Area" );
rval = mb.tag_get_handle( tag_name4.c_str(), 1, MB_TYPE_DOUBLE, tagArea, MB_TAG_DENSE | MB_TAG_CREAT );CHECK_ERR( rval );
/*
* get all plys first, then vertices, then move them on the surface of the sphere
* radius is 1., most of the time
*
*/
Range polygons;
rval = mb.get_entities_by_dimension( 0, 2, polygons );
if( MB_SUCCESS != rval ) return rval;
Range connecVerts;
rval = mb.get_connectivity( polygons, connecVerts );
if( MB_SUCCESS != rval ) return rval;
void* data; // pointer to the LOC in memory, for each vertex
int count;
rval = mb.tag_iterate( tagTracer, connecVerts.begin(), connecVerts.end(), count, data );CHECK_ERR( rval );
// here we are checking contiguity
assert( count == (int)connecVerts.size() );
double* ptr_DP = (double*)data;
// lambda is for longitude, theta for latitude
// param will be: (la1, te1), (la2, te2), b, c; hmax=1, r=1/2
// nondivergent flow, page 5, case 1, (la1, te1) = (M_PI, M_PI/3)
// (la2, te2) = (M_PI, -M_PI/3)
// la1, te1 la2 te2 b c hmax r
if( field_type == 1 ) // quasi smooth
{
double params[] = { M_PI, M_PI / 3, M_PI, -M_PI / 3, 0.1, 0.9, 1., 0.5 };
for( Range::iterator vit = connecVerts.begin(); vit != connecVerts.end(); ++vit )
{
EntityHandle oldV = *vit;
CartVect posi;
rval = mb.get_coords( &oldV, 1, &( posi[0] ) );CHECK_ERR( rval );
moab::IntxUtils::SphereCoords sphCoord = moab::IntxUtils::cart_to_spherical( posi );
ptr_DP[0] = IntxUtilsCSLAM::quasi_smooth_field( sphCoord.lon, sphCoord.lat, params );
;
ptr_DP++; // increment to the next node
}
}
else if( 2 == field_type ) // smooth
{
CartVect p1, p2;
moab::IntxUtils::SphereCoords spr;
spr.R = 1;
spr.lat = M_PI / 3;
spr.lon = M_PI;
p1 = moab::IntxUtils::spherical_to_cart( spr );
spr.lat = -M_PI / 3;
p2 = moab::IntxUtils::spherical_to_cart( spr );
// x1, y1, z1, x2, y2, z2, h_max, b0
double params[] = { p1[0], p1[1], p1[2], p2[0], p2[1], p2[2], 1, 5. };
for( Range::iterator vit = connecVerts.begin(); vit != connecVerts.end(); ++vit )
{
EntityHandle oldV = *vit;
CartVect posi;
rval = mb.get_coords( &oldV, 1, &( posi[0] ) );CHECK_ERR( rval );
moab::IntxUtils::SphereCoords sphCoord = moab::IntxUtils::cart_to_spherical( posi );
ptr_DP[0] = IntxUtilsCSLAM::smooth_field( sphCoord.lon, sphCoord.lat, params );
;
ptr_DP++; // increment to the next node
}
}
else if( 3 == field_type ) // slotted
{
// la1, te1, la2, te2, b, c, r
double params[] = { M_PI, M_PI / 3, M_PI, -M_PI / 3, 0.1, 0.9, 0.5 }; // no h_max
for( Range::iterator vit = connecVerts.begin(); vit != connecVerts.end(); ++vit )
{
EntityHandle oldV = *vit;
CartVect posi;
rval = mb.get_coords( &oldV, 1, &( posi[0] ) );CHECK_ERR( rval );
moab::IntxUtils::SphereCoords sphCoord = moab::IntxUtils::cart_to_spherical( posi );
ptr_DP[0] = IntxUtilsCSLAM::slotted_cylinder_field( sphCoord.lon, sphCoord.lat, params );
;
ptr_DP++; // increment to the next node
}
}
// add average value for quad/polygon (average corners)
// do some averages
Range::iterator iter = polygons.begin();
// double local_mass = 0.; // this is total mass on one proc
while( iter != polygons.end() )
{
rval = mb.tag_iterate( tagElem, iter, polygons.end(), count, data );CHECK_ERR( rval );
double* ptr = (double*)data;
rval = mb.tag_iterate( tagArea, iter, polygons.end(), count, data );CHECK_ERR( rval );
double* ptrArea = (double*)data;
for( int i = 0; i < count; i++, ++iter, ptr++, ptrArea++ )
{
const moab::EntityHandle* conn = NULL;
int num_nodes = 0;
rval = mb.get_connectivity( *iter, conn, num_nodes );CHECK_ERR( rval );
if( num_nodes == 0 ) return MB_FAILURE;
std::vector< double > nodeVals( num_nodes );
double average = 0.;
rval = mb.tag_get_data( tagTracer, conn, num_nodes, &nodeVals[0] );CHECK_ERR( rval );
for( int j = 0; j < num_nodes; j++ )
average += nodeVals[j];
average /= num_nodes;
*ptr = average;
// now get area
std::vector< double > coords;
coords.resize( 3 * num_nodes );
rval = mb.get_coords( conn, num_nodes, &coords[0] );CHECK_ERR( rval );
IntxAreaUtils sphAreaUtils;
*ptrArea = sphAreaUtils.area_spherical_polygon( &coords[0], num_nodes, radius );
// we should have used some
// total mass:
// local_mass += *ptrArea * average;
}
}
// now we can delete the tags? not yet
return MB_SUCCESS;
}
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 169 of file create_dp.cpp.
References add_field_value(), moab::Range::begin(), CHECK_ERR, moab::Interface::coords_iterate(), IntxUtilsCSLAM::departure_point_case1(), moab::Range::end(), ErrorCode, field_type, moab::Interface::get_entities_by_dimension(), moab::Interface::load_mesh(), mb, MB_SUCCESS, MB_TAG_CREAT, MB_TAG_DENSE, MB_TYPE_DOUBLE, output, moab::Range::size(), t, moab::Interface::tag_get_handle(), moab::Interface::tag_iterate(), and moab::Interface::write_file().
{
if( argc < 3 )
{
std::cout << " usage: create_dp <input> <output> -t <time> -dt <delta_t> [-skipdp] -f "
"<field> -h \n";
return 1;
}
bool skip = false;
double dt = 0.1;
double t = 0.1; // corresponding to diffusion first step
int index = 2;
char* input_mesh1 = argv[1];
char* output = argv[2];
while( index < argc )
{
if( !strcmp( argv[index], "-t" ) ) // this is for radius to project
{
t = atof( argv[++index] );
}
if( !strcmp( argv[index], "-dt" ) ) // delete partition sets
{
dt = atof( argv[++index] );
}
if( !strcmp( argv[index], "-h" ) )
{
std::cout << " usage: create_dp <input> <output> -t <time> -dt <delta_t> [-skipdp] "
"-f <field> -h \n";
return 1;
}
if( !strcmp( argv[index], "-f" ) ) // delete partition sets
{
field_type = atoi( argv[++index] );
}
if( !strcmp( argv[index], "-skipdp" ) )
{
skip = true;
}
index++;
}
Core moab;
Interface& mb = moab;
ErrorCode rval;
rval = mb.load_mesh( input_mesh1 );
std::cout << " -t " << t << " -dt " << dt << " input: " << input_mesh1 << " output: " << output << "\n";
// skip if we need for DP (already existing)
if( skip )
{
std::cout << " do not add DP tag \n";
}
else
{
Range verts;
rval = mb.get_entities_by_dimension( 0, 0, verts );
if( MB_SUCCESS != rval ) return 1;
double *x_ptr, *y_ptr, *z_ptr;
int count;
rval = mb.coords_iterate( verts.begin(), verts.end(), x_ptr, y_ptr, z_ptr, count );
if( MB_SUCCESS != rval ) return 1;
assert( count == (int)verts.size() ); // should end up with just one contiguous chunk of vertices
Tag tagh = 0;
std::string tag_name( "DP" );
rval = mb.tag_get_handle( tag_name.c_str(), 3, MB_TYPE_DOUBLE, tagh, MB_TAG_DENSE | MB_TAG_CREAT );CHECK_ERR( rval );
void* data; // pointer to the LOC in memory, for each vertex
int count_tag;
rval = mb.tag_iterate( tagh, verts.begin(), verts.end(), count_tag, data );CHECK_ERR( rval );
// here we are checking contiguity
assert( count_tag == (int)verts.size() );
double* ptr_DP = (double*)data;
for( int v = 0; v < count; v++ )
{
// EntityHandle v = verts[v];
CartVect pos( x_ptr[v], y_ptr[v], z_ptr[v] );
CartVect newPos;
IntxUtilsCSLAM::departure_point_case1( pos, t, dt, newPos );
ptr_DP[0] = newPos[0];
ptr_DP[1] = newPos[1];
ptr_DP[2] = newPos[2];
ptr_DP += 3; // increment to the next vertex
}
}
rval = add_field_value( mb );
mb.write_file( output );
return 0;
}
| int field_type = 1 |
Definition at line 22 of file create_dp.cpp.
Referenced by add_field_value(), and main().
| double radius = 1. |
Definition at line 21 of file create_dp.cpp.
 1.7.6.1
1.7.6.1